Active Matter: Model Systems and Experimental Tests
Agnese Callegari, Antonio Ciarlo, Sreekanth Manikandan
Dates and times:
23 Feb 14:00-15:00 (Agnese)
24 Feb 11:30-12:30 (Antonio)
24 Feb 14:00-15:00 (Sreekanth)
Place: PJ
Winter school on Geometry of nonequilibrium critical phenomena
Active matter is a broad class of systems that operate intrinsically out of equilibrium. It spans multiple length scales—from macroscopic to micro- and nanoscopic—and includes both biological and artificial realizations, often displaying rich and emerging collective behaviors. The study of active matter aims to explain and interpret these phenomena using concepts and tools from physics. As such, understanding active and non-equilibrium systems requires a combination of theoretical, computational, and experimental approaches.
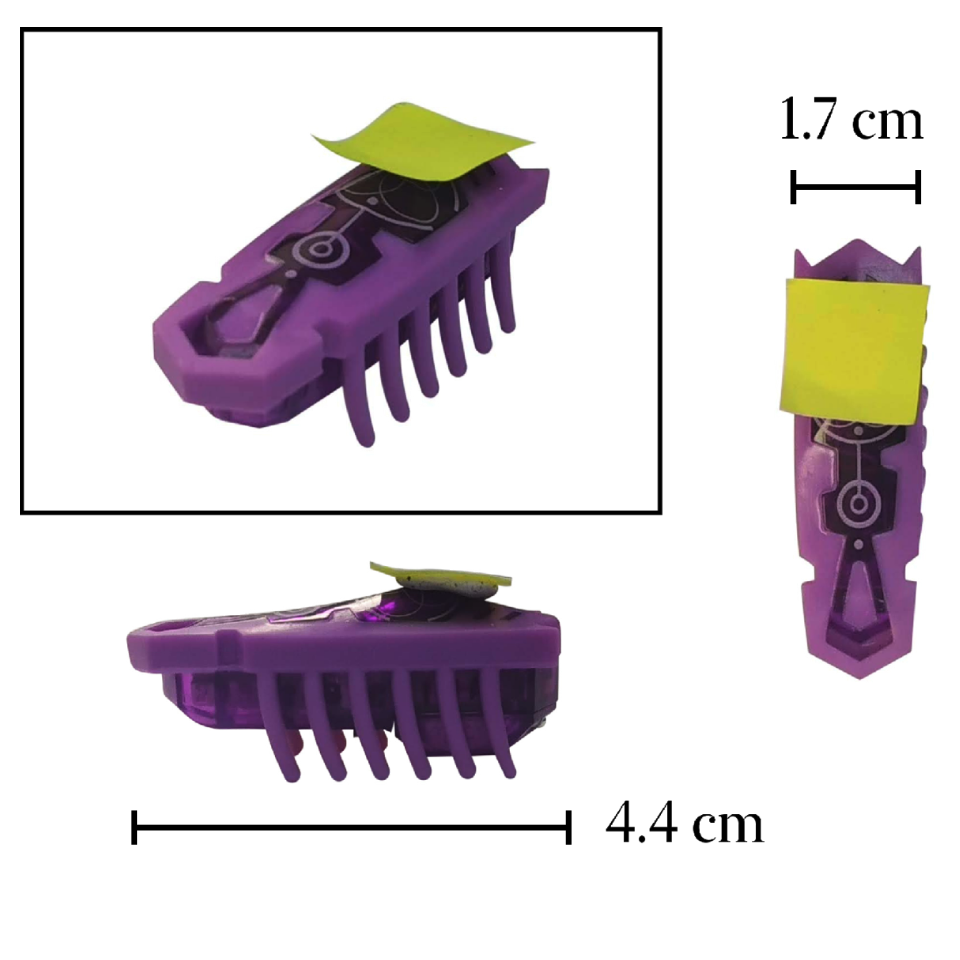
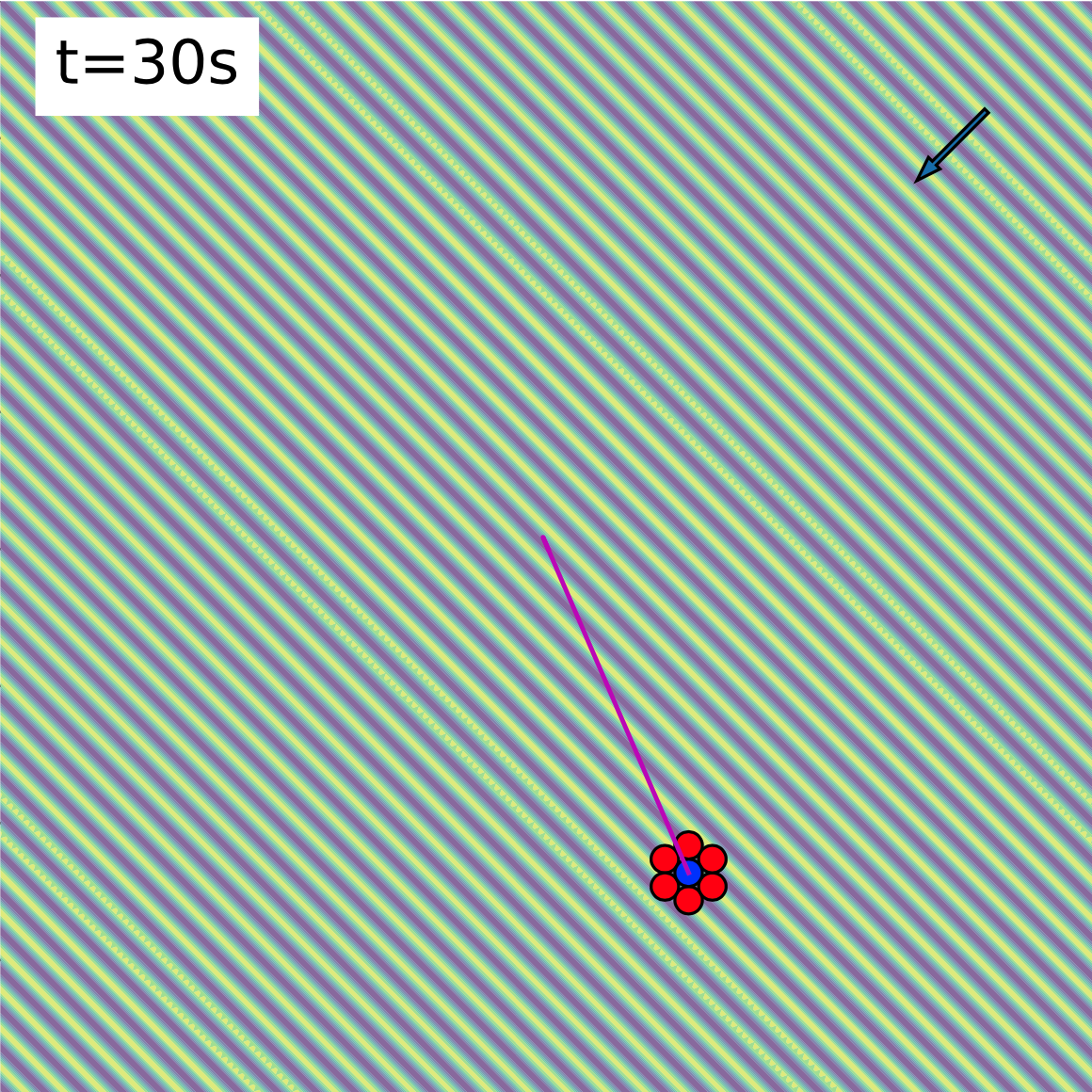
In the first part of the lecture, we introduce the concept of an active particle and demonstrate how it can be embodied in a macroscopic, self-propelled toy robot (a Hexbug). Despite their simplicity, such systems reproduce characteristic—and sometimes counterintuitive—features of microscopic active matter. These experiments have a strong pedagogical value and are designed to help bridge a gap in traditional physics curricula at the primary and secondary education levels.
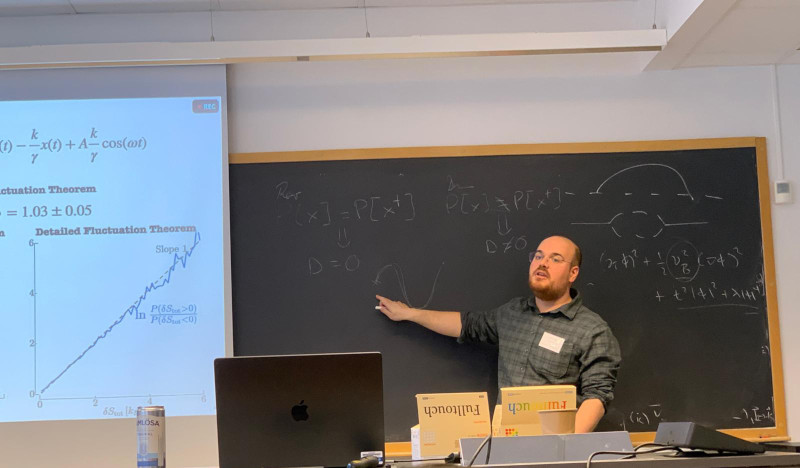
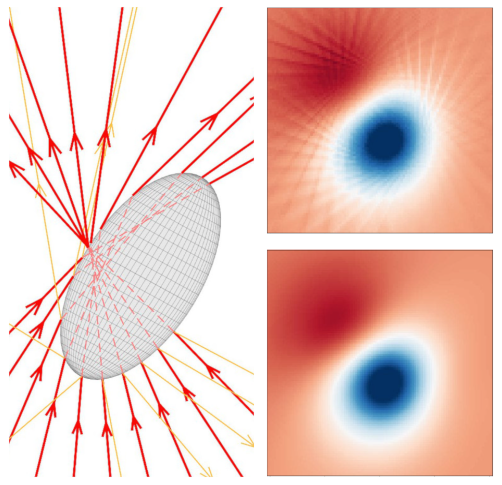
The second part of the lecture focuses on active matter and non-equilibrium phenomena at the microscopic scale, where advanced experimental tools are essential. Optical tweezers provide precise control over microscopic systems and access to key physical observables. We introduce their operating principles and illustrate how they can be used to construct a minimal, well-controlled experimental model for studying non-equilibrium dynamics at the single-particle level.
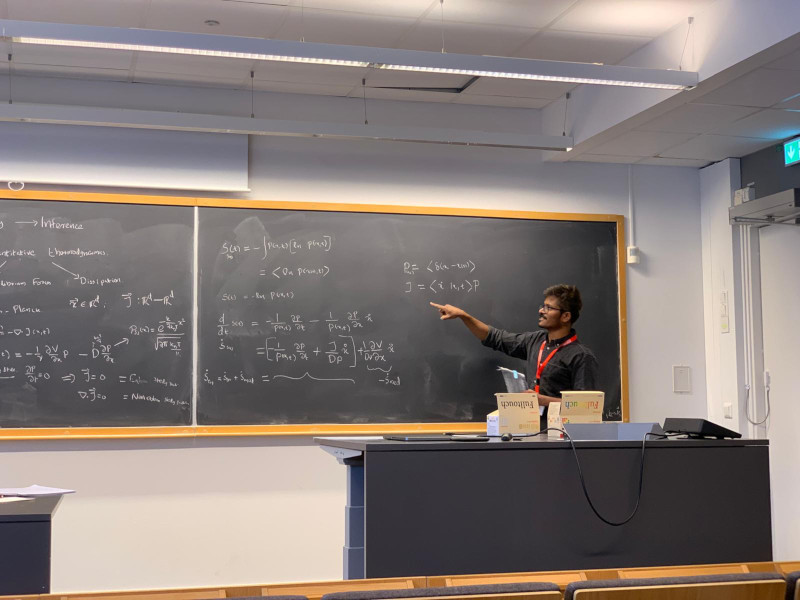
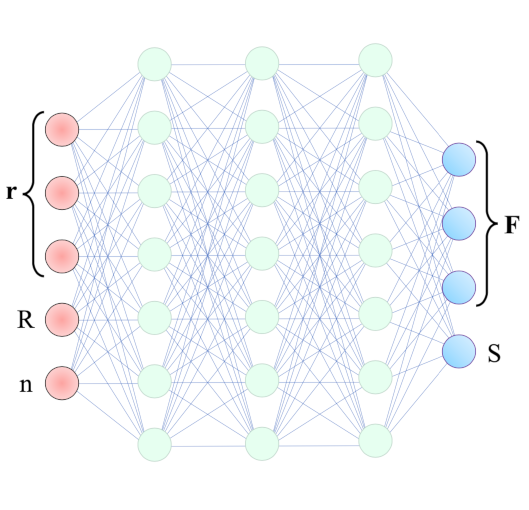
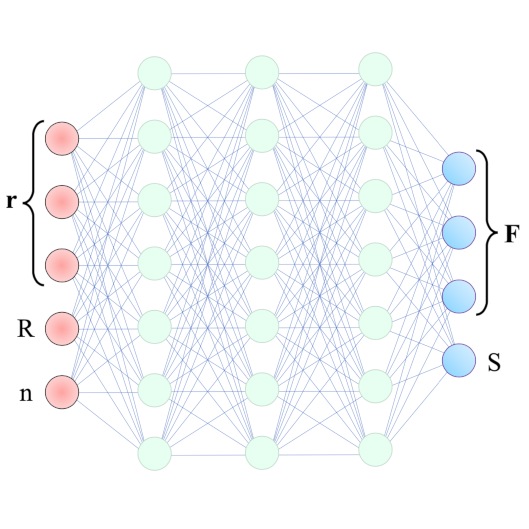
In the final part of the lecture, we turn to the theoretical and computational tools required to analyze active matter systems. We discuss how non-equilibrium dynamics can be quantitatively characterized directly from experimental data in a model-independent framework. This naturally leads to an introduction to machine-learning–based inference techniques, which extract dynamical and thermodynamic information from data without relying on a priori assumptions about the underlying physical model.
References:
[1] A. Barona Balda, A. Argun, A. Callegari, G. Volpe. Playing with Active Matter, Am. J. Phys. 92, 847–858 (2024). https://doi.org/10.1119/5.0125111
[2] Martins, T.T., Malavazi, A.H.A., Kamizaki, L.P. et al. Fluctuation theorems with optical tweezers: theory and practice. Eur. Phys. J. Plus 141, 71 (2026). https://doi.org/10.1140/epjp/s13360-025-07181-4
[3] Manikandan, Sreekanth K. and Ghosh, T. and Mandal, T. and Biswas, A. and Sinha, B. and Mitra, D. Estimate of entropy production rate can spatiotemporally resolve the active nature of cell flickering. Phys. Rev. Res. 6, 023310 (2024). https://doi.org/10.1103/PhysRevResearch.6.023310
Photos