Yu-Wei Chang
NEMES 2025, 24-26 September, 2025
Date: 25 September 2025
Time: 09:00 – 09:45
Place: Clarion Hotel Draken
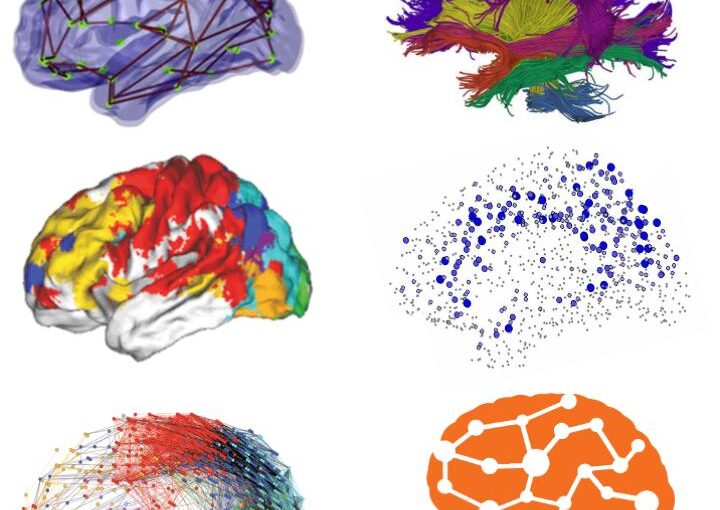
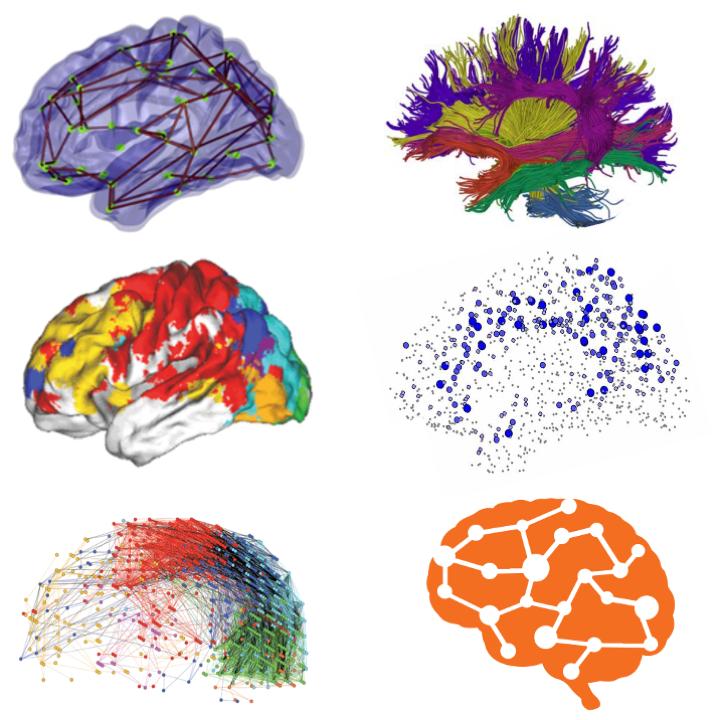
This plenary presents a practical framework for analysing neuroimaging data with network science and deep learning. It moves from modality-specific preprocessing to graph construction (single-layer and multiplex), then covers core graph measures, group inference, and brain-surface visualization, highlighting recent work from Associate Professor Joana B. Pereira’s group (Department of Clinical Neuroscience, Karolinska Institutet). It also introduces deep-learning pipelines for neuroimaging data: reservoir-computing memory capacity analysis, GapNet for handling missing data, and a robust feature-attribution method combined with SNP (single nucleotide polymorphism) information. The plenary concludes with the BRAPH 2 framework, which supports these pipelines and extends to other ongoing projects (e.g., light-sheet microscopy, Raman spectroscopy).