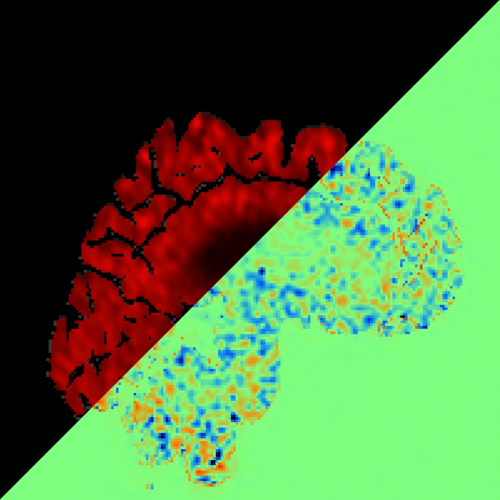
The proposed method enables accurate synthesis of longitudinal tau pathology. (Image by Y.-W. Chang.)Synthesizing tau pathology from structural brain imaging using deep learning Yu-Wei Chang, Giovanni Volpe, Joana B Pereira Date: 22 August 2023 Time: 10:15 AM PDT
In vivo tau-positron emission tomography (PET) is crucial for determining the stage of Alzheimer’s disease (AD). However, this method is expensive, not widely available, and exposes patients to ionizing radiation, which poses a carcinogenic risk. To address this issue, I’ll present our proposed method, a deep-learning synthesis approach for follow-up tau-PET brain images from baseline tau-PET images using a generative adversarial network (GAN). This technique has the potential to provide valuable insights into the progression of AD, the effectiveness of new treatments, and more accurate diagnosis of the disease.
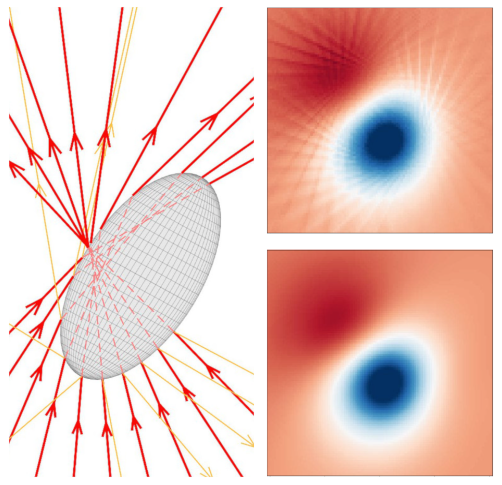
Focused rays scattered by an ellipsoidal particles (left). Optical torque along y calculated in the x-y plane using ray scattering with a grid of 1600 rays (up, right) and using a trained neural network (down, right). (Image by the Authors of the manuscript.)Faster and More Accurate Geometrical-Optics Optical Force Calculation Using Neural Networks
David Bronte Ciriza, Alessandro Magazzù, Agnese Callegari, Gunther Barbosa, Antonio A. R. Neves, Maria Antonia Iatì, Giovanni Volpe, and Onofrio M. Maragò
SPIE-ETAI, San Diego, CA, USA, 20 – 24 August 2023 Date: 22 August 2023
Optical tweezers are an established and versatile tool for the optical trapping and manipulation of microscopic object using light. Modelling the interaction between particles and light, i.e., being able to calculate the optical force and torque the light exerts on the particle, is important to both understand the outcome of experiments and help designing the experimental setup to the obtain a certain outcome. Different modelling approximation and relative calculation techniques are employed depending on the size of the particle and the features of the trapping light. In this work, we will focus on the geometrical optics regime, which hold for particles whose size is significantly larger than the wavelength of the light. In this approximation, optical forces and torques are calculated by discretizing the trapping light beam into a set of rays. Each ray, impinging on the particle, is reflected and refracted multiple times and, in this scattering process, transfers momentum and angular momentum to the particle. However, the choice of the discretization, i.e., which and how many rays we use to represent a beam, sets a trade-off between calculation speed and accuracy. Here, we show that using neural networks allows overcoming this limitation, obtaining not only faster but also more accurate simulations. We demonstrate this using an optically trapped spherical particle for which we obtain an analytical solution to use as ground truth. Then, we exploit our neural networks method to study the dynamics of ellipsoidal particles in a double trap, a system that would be computationally impossible otherwise.
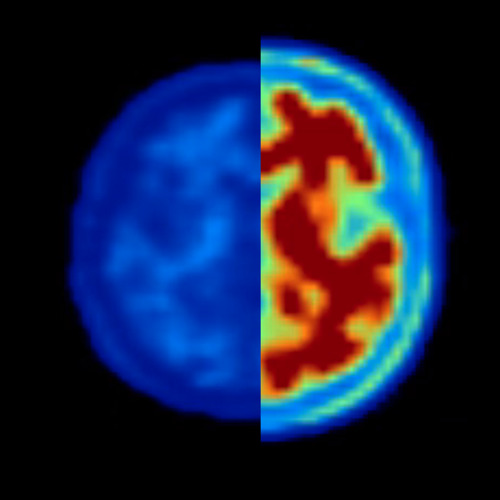
Low dose and standard dose PET translation. (Image by H. Zhao.)High quality PET image synthesis using GAN-transformer Hang Zhao Date: 21 August 2023 Time: 5:30 PM PDT
Amyloid-beta positron emission tomography (PET) is used for the diagnosis of Alzheimer’s disease (AD). However, the inherent radiation of radioactive tracers used for PET is potentially harmful to the human body. In this study, we present a deep-learning framework for generating high-quality standard-dose PET brain images from scans that have a simulated reduced injected dose of 12.5% of the standard injected dose, thus reducing radiation exposure without compromising image quality. This novel approach achieves remarkable similarity to full-dose images in both visual and quantitative aspects. Our method offers the potential of enabling safer and more accessible PET imaging for early Alzheimer’s disease detection.
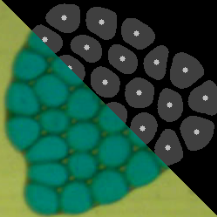
The proposed method allows for robust detection, segmentation, and tracking of soft granular clusters. (Image by J. Pineda.)Unveiling the complex dynamics of soft granular materials using deep learning Jesús Pineda Date: 21 August 2023 Time: 5:30 PM PDT
Soft granular materials, comprising closely packed grains held together by a thin layer of lubricating fluid, display intricate many-body dynamics resulting in complex flows and rheological behavior, including plasticity and viscoelasticity, memory effects, and avalanches. Despite their widespread presence in nature and industrial applications, the structural mechanics and microscale dynamics of soft granular clusters still need to be better understood, especially those under strong confinement or surrounded by free interfaces. This work aims to bridge the gap in understanding the internal dynamics of finite-sized soft granular media by introducing a deep learning approach to characterize the shapes and movements of deformable grains in the material. We demonstrate the reliability and versatility of the method by studying the dynamics of soft granular clusters that self-organize under external flow in various physically relevant scenarios.
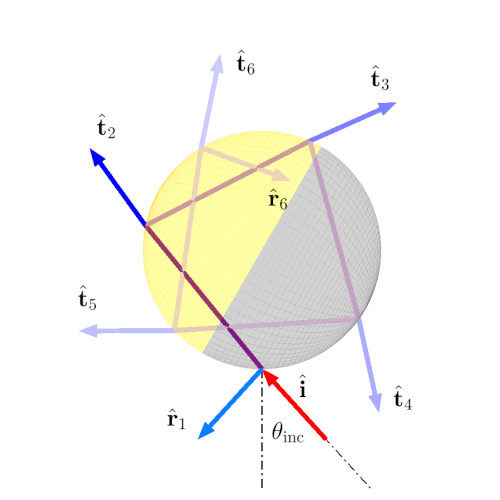
Schematic of the scattering of a light ray on a Janus particle. (Image by A. Callegari.)Janus Particles in Geometrical Optics
Agnese Callegari, Giovanni Volpe
SPIE-OTOM, San Diego, CA, USA, 20 – 24 August 2023 Date: 21 August 2023
Janus particles are microscopic objects characterized by one feature with dual properties. Typical examples of Janus particles are metal-coated silica particles, widely used in soft and active matter applications because of their versatility and relative simplicity of their fabrication. Janus particles are often utilized in the presence of optical potentials. Given the non-homogeneous nature of their refractive index composition, the interaction between the Janus particle and light is non-trivial to model: in addition to the optical force, the particle experiences an optical torque, even in the case of spherically shaped Janus particles, and its metallic cap can also absorb part of the optical power impinging on the particle. Here, we provide a description of the Janus particle in the geometrical optics approximation, and an implementation for calculating forces, torques, and absorption on partially coated Janus particles of spherical and ellipsoidal shape. This implementation is based on the existing OTGO toolbox, developed in Matlab for calculating optical forces and torques in the geometrical optics regime. We first validate our model against the known experimental results and show that interesting dynamical effects arise in the presence of travelling-wave optical potential.
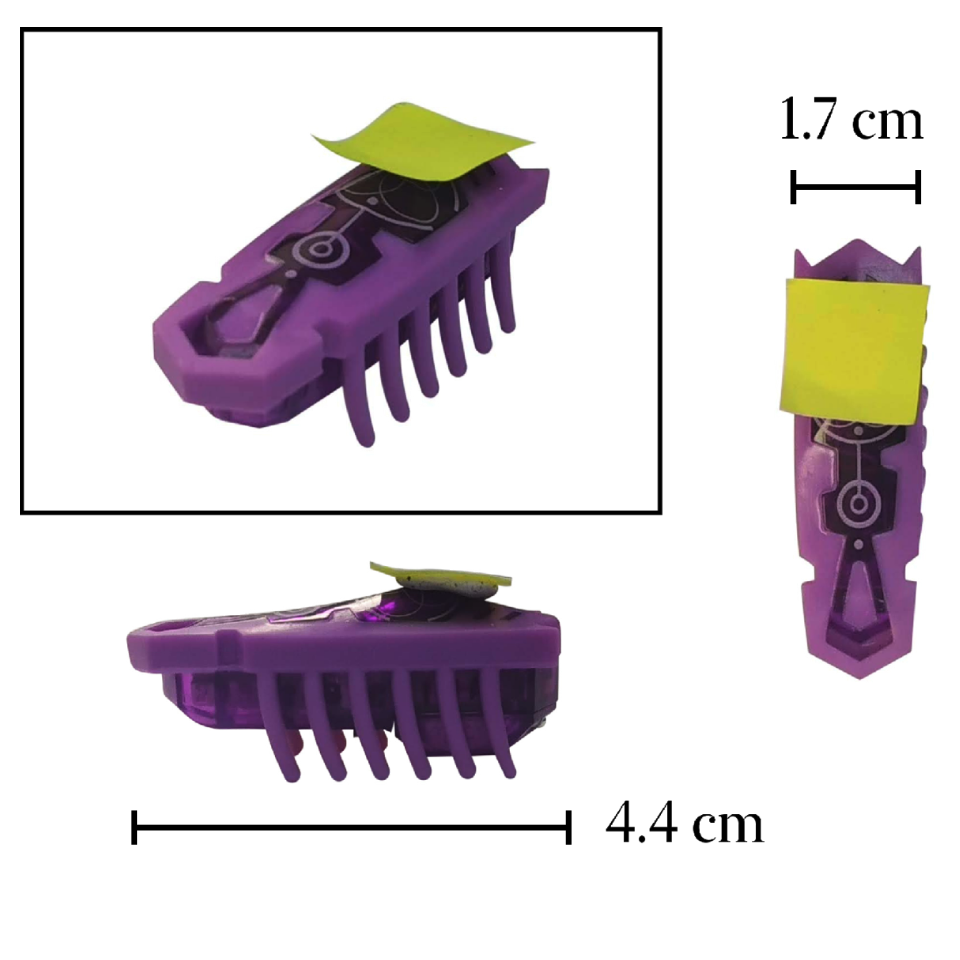
One exemplar of the HEXBUGS used in the experiment. (Image by the Authors of the manuscript.)Playing with Active Matter
Angelo Barona Balda, Aykut Argun, Agnese Callegari, Giovanni Volpe
SPIE-OTOM, San Diego, CA, USA, 20 – 24 August 2023 Date: 21 August 2023
In the last 20 years, active matter has been a very successful research field, bridging the fundamental physics of nonequilibrium thermodynamics with applications in robotics, biology, and medicine. This field deals with active particles, which, differently from passive Brownian particles, can harness energy to generate complex motions and emerging behaviors. Most active-matter experiments are performed with microscopic particles and require advanced microfabrication and microscopy techniques. Here, we propose some macroscopic experiments with active matter employing commercially available toy robots, i.e., the Hexbugs. We demonstrate how they can be easily modified to perform regular and chiral active Brownian motion. We also show that Hexbugs can interact with passive objects present in their environment and, depending on their shape, set them in motion and rotation. Furthermore, we show that, by introducing obstacles in the environment, we can sort the robots based on their motility and chirality. Finally, we demonstrate the emergence of Casimir-like activity-induced attraction between planar objects in the presence of active particles in the environment.
The Soft Matter Lab participates to the SPIE Optics+Photonics conference in San Diego, CA, USA, 20-24 August 2023, with the presentations listed below.
Agnese Callegari: Playing with active matter
21 August 2023 • 4:05 PM – 4:20 PM PDT | Conv. Ctr. Room 6D
Giovanni Volpe is also co-author of the presentations:
Jiawei Sun (KI): (Poster) Assessment of nonlinear changes in functional brain connectivity during aging using deep learning
21 August 2023 • 5:30 PM – 7:00 PM PDT | Conv. Ctr. Exhibit Hall A
Blanca Zufiria Gerbolés (KI): (Poster) Exploring age-related changes in anatomical brain connectivity using deep learning analysis in cognitively healthy individuals
21 August 2023 • 5:30 PM – 7:00 PM PDT | Conv. Ctr. Exhibit Hall A
Mite Mijalkov (KI): Uncovering vulnerable connections in the aging brain using reservoir computing
22 August 2023 • 9:15 AM – 9:30 AM PDT | Conv. Ctr. Room 6C
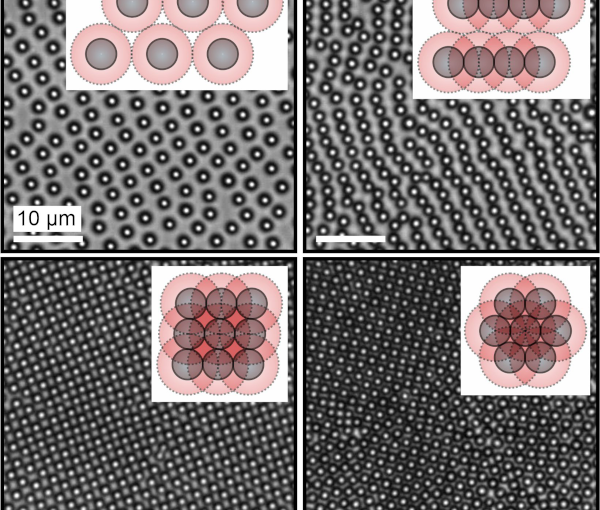
Interfacial self-assembly behaviour of soft core-shell particles. (Image by M. Rey.)Versatile strategy for homogeneous drying of dispersed particles Marcel Rey, UK COLLOIDS 2023 Date: 17 July 2023 Time: 11:20 (CET)
After spilling coffee, a tell-tale stain is left by the drying droplet. This universal phenomenon, known as the “coffee ring effect”, is observed independent of the dispersed material. However, for many technological processes such as coating techniques and ink-jet printing a uniform particle deposition is required and the coffee ring effect is a major drawback.
Here, we present a simple and versatile strategy to achieve homogeneous drying patterns by modifying the surface of the dispersed particles with surface-active polymers. A particle dispersion is mixed with excess surface-active polymers (e.g. polyvinyl alcohol). The polymer partially adsorbs onto the particles and excess polymer is removed by centrifugation and redispersion. While pure particle dispersions form a typical coffee ring, the polymer-modified dispersions dry into a uniform particle deposit. In this talk, I will discuss how the polymer coating prevents accumulation and pinning at the droplet edge and leads to a uniform particle deposition after drying.
It should be highlighted that the presented method is independent of particle shape (e.g. spherical, ellipsoidal or ill-defined particle shapes) and is applicable to a variety of commercial pigment particles (e.g. hematite, goethite or titanium dioxide). Further, the method works for different dispersion media (e.g. aqueous, polar and apolar solvents), demonstrating the practicality of this work for everyday processes.
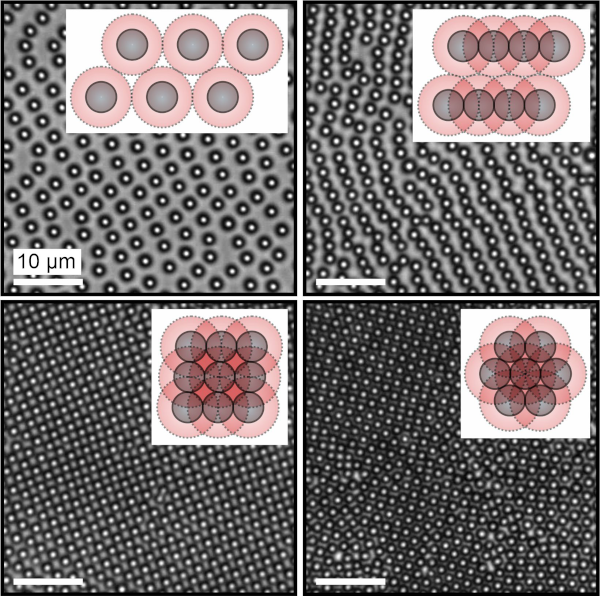
Interfacial self-assembly behaviour of soft core-shell particles. (Image by M. Rey.)Complex self-assembly / Overcoming the coffee ring effect
Marcel Rey
Presentation for the School of Materials at the University of Manchester Date: 20 July 2023
In this seminar, I will talk about complex self-assembly behaviour of simple building blocks. Afterwards, I will introduce a simple yet versatile strategy to overcome the coffee ring effect and obtain homogeneous drying of particle dispersions.
Spherical colloidal particles confined at liquid interfaces typically self-assemble into hexagonal packing. Here, I will show that much more complex self-assembly behaviour is possible spherical particles with a hard-core / soft-shell architecture. Upon compression, these core-shell particles transition from a hexagonal packing to a chain packing, then to a square packing and finally to a hexagonal close packing. I will rationalize these experimental observations with calculations and simulations using simple core-shell potentials.
After spilling coffee, a tell-tale circular stain is left by the drying droplet. This universal phenomenon, known as the “coffee ring effect”, is observed independent of the suspended material. We recently developed a simple yet versatile strategy to achieve homogeneous drying of dispersed particles. Modifying the particle surface with surface-active polymers provides enhanced steric stabilization and facilitates adsorption to the liquid/air interface which, after drying, leads to uniform particle deposition. This method is independent of particle size and shape and applicable to a variety of commercial pigment particles promising applications in daily life.