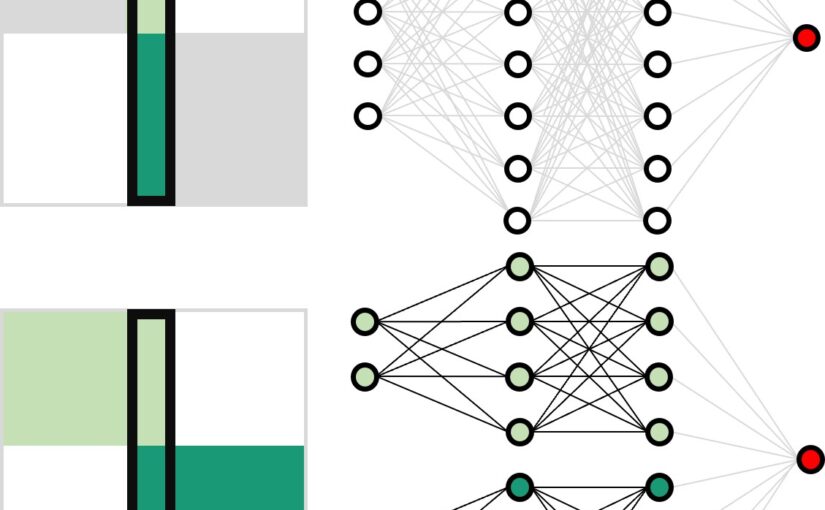
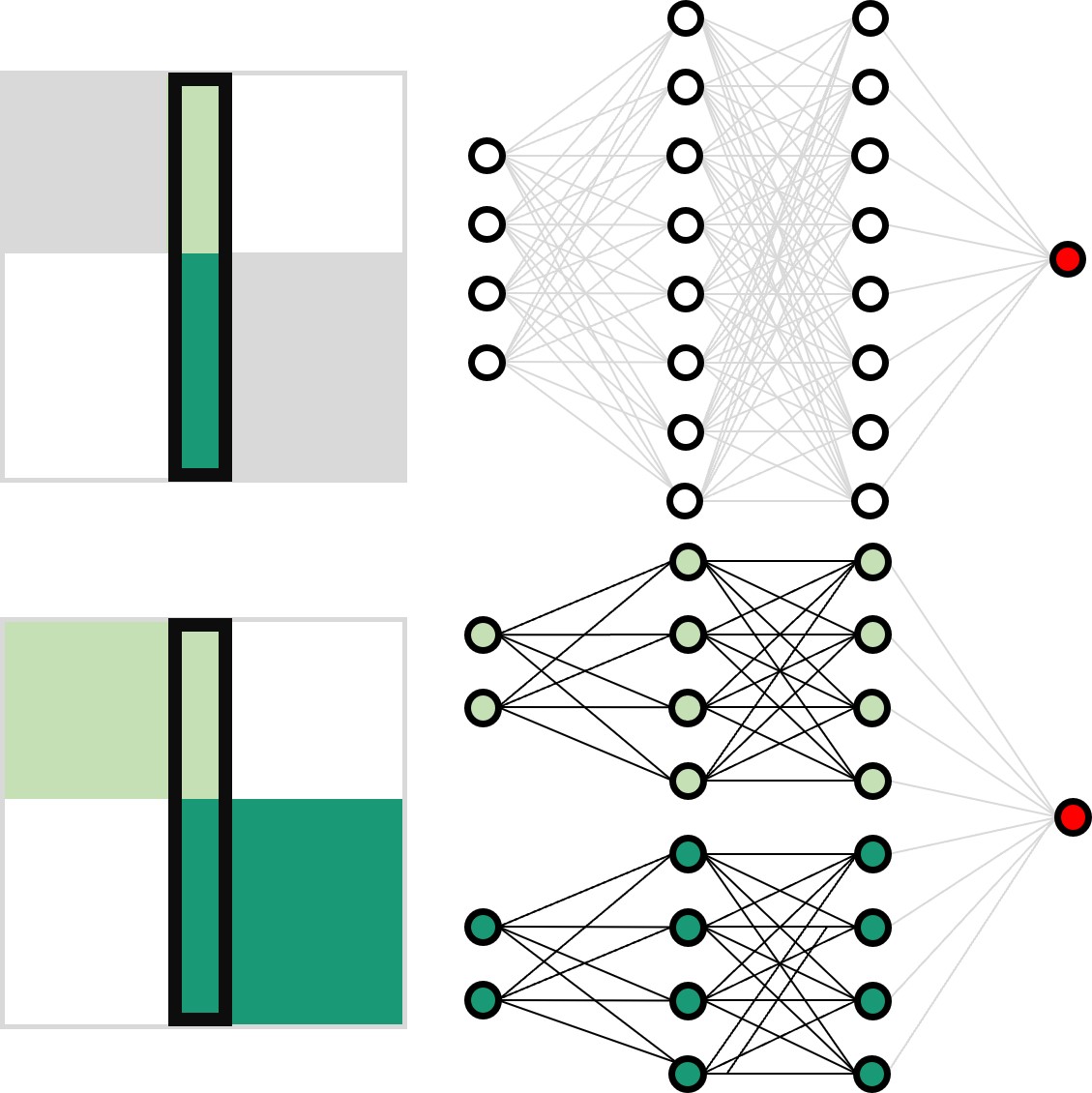
Working principles for training neural networks with highly incomplete dataset: vanilla (upper panel) vs GapNet (lower panel) (Image by Yu-Wei Chang.)GapNet: Neural network training with highly incomplete datasets
Presentation in group meeting of Prof. Michael Strano, Department of Chemical Engineering, Massachusetts Institute of Technology, USA and DiSTAP, Singapore-MIT Alliance for Research and Technology, Singapore. Date: 23 February 2024
Neural network training requires complete data. We have introduced GapNet, which can train neural networks with incomplete data, using medical data. This approach can be generalized for integrating spectrum data across different frequency ranges, allowing the neural network to combine important information from diverse spectrum datasets.
Video microscopy has a long history of providing insights and breakthroughs for a broad range of disciplines, from physics to biology. Image analysis to extract quantitative information from video microscopy data has traditionally relied on algorithmic approaches, which are often difficult to implement, time consuming, and computationally expensive. Recently, alternative data-driven approaches using deep learning have greatly improved quantitative digital microscopy, potentially offering automatized, accurate, and fast image analysis. However, the combination of deep learning and video microscopy remains underutilized primarily due to the steep learning curve involved in developing custom deep-learning solutions. To overcome this issue, we have introduced a software, DeepTrack 2.1, to design, train and validate deep-learning solutions for digital microscopy.
Fredrik Skärberg (right) and opponent Prof. Rebecka Jörnsten (left). (Photo by A. Ciarlo)Fredrik Skärberg completed the first half of his doctoral studies and he defended his half-time on the 10th of January 2024.
The presentation, with title: “Holographic characterization of biological nanoparticles using deep learning”, was held in hybrid format, with part of the audience in the Nexus room and the rest connected through zoom. The half-time consisted in a presentation about his past and planned projects and it was followed by a discussion and questions proposed by his opponent Prof. Rebecka Jörnsten.
The presentation started with a short background to characterization of biological particles inside cells and an introduction to the papers included in the half-time.
It continued with images and videos of various particle types inside cells, both tracked and characterized, followed by a description of the LodeSTAR-model.
In the last section, he outlined the proposed continuation of his PhD, with an ongoing project for monitoring lipid droplets during long timescales and a neural network for 3D rotation parameter estimation of rotating biological samples.
PhD Student: Fredrik Skärberg Supervisor: Daniel Midtvedt Co-supervisors: Giovanni Volpe, Fredrik Höök
Fredrik Skärberg and audience in Nexus. (Photo by A. Ciarlo.)
Emiliano Gomez Ruiz during his half-time seminar. (Photo by L. Pérez García.)Emiliano Gómez completed the first half of his doctoral studies and he defended his half-time on the 29th of November 2023.
The presentation was conducted in a hybrid format, with part of the audience present in the Nexus room and the remainder connected through Zoom. The seminar comprised a presentation covering both his completed and planned projects, followed by a discussion and questions posed by his opponent, Prof. Martin Adiels.
The presentation commenced with an overview of his concluded projects. The first project with title “Brain Analysis using Graph Theory 2” is a software that uses Deep Learning and Graph Theory to analyse brain networks, this software is an open-source MATLAB with github “github.com/braph-software/BRAPH-2” and two projects in which this software was applied, first one on haematopoietic cell structural pattern taken from bone marrow and the second one is of memory capacity of aging brain networks using reservoir computing.
(Image by A. Argun)Deep Learning for Imaging and Microscopy
Giovanni Volpe Symposium on AI, Neuroscience, and Aging, Stockholm, Sweden, 27 November 2023 Date: 27 November 2023 Time: 15:55
Video microscopy has a long history of providing insights and breakthroughs for a broad range of disciplines, from physics to biology. Image analysis to extract quantitative information from video microscopy data has traditionally relied on algorithmic approaches, which are often difficult to implement, time consuming, and computationally expensive. Recently, alternative data-driven approaches using deep learning have greatly improved quantitative digital microscopy, potentially offering automatized, accurate, and fast image analysis. However, the combination of deep learning and video microscopy remains underutilized primarily due to the steep learning curve involved in developing custom deep-learning solutions. To overcome this issue, we have introduced a software, DeepTrack 2.1, to design, train and validate deep-learning solutions for digital microscopy. We use it to exemplify how deep learning can be employed for a broad range of applications, from particle localization, tracking and characterization to cell counting and classification. Thanks to its user- friendly graphical interface, DeepTrack 2.1 can be easily customized for user-specific applications, and, thanks to its open-source object-oriented programming, it can be easily expanded to add features and functionalities, potentially introducing deep-learning-enhanced video microscopy to a far wider audience.
Complex Dynamics in Active Matter Systems, Frustration Effects, Magnus Forces and Synchronization
Charles Reichhardt
Los Alamos National Laboratory
30 November 2023, 16:30, Nexus
Active matter denotes systems with self-propulsion and arises in biological, soft, robotic, and social settings [1]. Here, we outline some of our group’s recent efforts in active systems, including active matter interacting with ordered and disordered substrates, where various kinds of active clogging and commensuration effects can occur that have connections with frustrated systems and Mott physics. We also discuss chiral active systems with a Magnus force, where we find edge currents similar to those found for topological systems or charged particles in magnetic fields. In the presence of quenched disorder, the chiral active system also shows side jump effects with an active matter Hall angle. Finally, we discuss coupled active matter swarmulators where, in addition to activity, the particles have an internal degree of freedom that can become synchronized or antisynchronized. This system shows a variety of new kinds of motility-induced phase-separated states, including active matter stripes, frustrated states, gels, cluster fluids, and glassy states.
[1] Active Brownian particles in complex and crowded environments, Clemens Bechinger, Roberto Di Leonardo, Hartmut Lowen, Charles Reichhardt Giorgio Volpe, and Giovanni Volpe, Reviews of Modern Physics 88 045006 (2016).
Since their invention by Ashkin et al. in the 1980s, optical tweezers have evolved into an indispensable tool in physics, especially in biophysics, with applications spanning from cell sorting to stretching single DNA strands. By the 2000s, commercial systems became available. Nevertheless, owing to their unique requirements, many labs prefer to construct their own, often drawing inspiration from existing designs.
A prominent optical tweezers design is the “miniTweezers” system, pioneered by Bustamante’s group in the late 1990s. This system has been widely adopted globally for force spectroscopy experiments on single molecules, including DNA, proteins, and RNA.
In this presentation, we unveil an advanced iteration of the miniTweezers. By enhancing its control and acquisition capabilities, we’ve augmented its versatility, enabling new experiment types. A significant breakthrough is the integration of real-time image feedback, which paves the way for automated procedures via deep learning-based image analysis, the first of which we demonstrate in this presentation.
We showcase this system’s capabilities through three distinct experiments:
A pulling experiment on a λ-DNA strand. By tethering DNA between two polystyrene beads – one anchored in a micropipette and the other manipulated by the tweezer – we illustrate near-complete automation, with the system autonomously handling bead trapping, attachment of the DNA and the pulling procedure.
An exploration of Coulomb interactions between charged particles. Here, one particle remains in a micropipette, while the other orbits the stationary bead, providing a 3D map of the interaction.
A non-contact stretching experiment on red blood cells is conducted under low osmotic pressure conditions. Modulating the laser power induces cell elongation along the laser’s propagation direction. By correlating this elongation with the optical force exerted by the lasers, we present a simple and non-invasive method to measure membrane rigidity.
In summary, these advancements mark a significant leap in the capabilities and applications of optical tweezers in biophysics. As we push the boundaries of automation and precision, we envision a future where such instruments can unravel even more intricate molecular interactions and cellular mechanics, setting the stage for groundbreaking discoveries.
Intracavity optical tweezers are a valuable tool for capturing microparticles in water by exploiting the nonlinear feedback effect induced by particle motion when confined in a laser cavity. This feedback effect arises as a consequence of the particle confinement inside a laser cavity, leading to fluctuations in the optical losses of the cavity due to Brownian motion. Our study extends intracavity optical trapping to both single-beam and counter-propagating dual-beam configurations, allowing us to investigate what happens when the two beams are slightly misaligned.
We used a 1030-nm Yb-doped ring fiber laser (pumped at 976 nm) with a hybrid optical path that allows light propagation in both fiber and air. To switch between single-beam and dual-beam configurations, a free-space removable isolator is incorporated, resulting in a single-beam configuration when the isolator is installed and a dual-beam configuration when the isolator is removed. We tracked particle positions in 3D using digital holographic microscopy and simultaneously measured the powers of the two counter-propagating beams, providing insight into the feedback effect. A crucial aspect of our experiment is the ability to introduce a transverse offset between the two optical beams in the two-beam configuration, resulting in periodic particle motion.
Our study has revealed a periodic orbital rotation of the particle that is closely related to the behavior of the two laser beam powers. We investigated the effect of beam separation and laser pump power on this phenomenon.
This phenomenon results from the interplay of gradient force, scattering force, and nonlinear feedback. The trapped particle undergoes periodic transitions between the two traps, causing a periodic variation in the laser power of the two beams. As a result, the particle acts as a micro-isolator, attenuating the beam in which it is trapped and amplifying the other beam. It was also observed that the duration of the transition increases as the pump power decreases and the distance between the two traps increases.
Future research will focus on refining the trapping configurations to exploit their potential for precise particle manipulation in the field of nanothermodynamics.
Opponent Saikat Chatterjee (on Zoom), Yu-Wei Chang (left), and PhD co-supervisor Joana B. Pereira (right). (Photo by P.-J. Chien.)Yu-Wei Chang completed the first half of his doctoral studies and he defended his half-time on the 3rd of November 2023.
The presentation was conducted in a hybrid format, with part of the audience present in the Nexus room and the remainder connected through Zoom. The seminar comprised a presentation covering both his completed and planned projects, followed by a discussion and questions posed by his opponent, Prof. Saikat Chatterjee.
The presentation commenced with an overview of his concluded projects. The first project involves handling incomplete medical datasets using neural networks and is published in ‘Machine Learning: Science and Technology.‘ It then transitioned to his second project, focusing on the development of software for brain connectivity analysis using multilayer graphs and deep learning. The corresponding repository is accessible on GitHub. In the final segment, he outlined the proposed continuation of his PhD, discussing an ongoing project centered around the deep learning analysis of longitudinal brain neural imaging data.
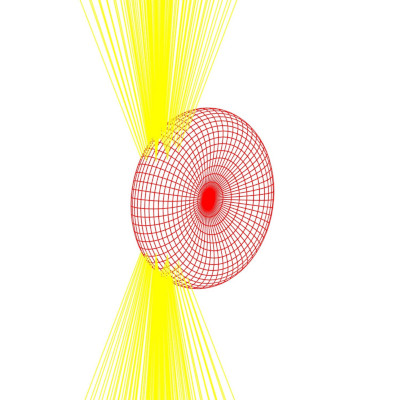
Schematic of a red blood cell in a focused optical beam. (Image by E. Erdem.)Optical trapping of red blood cells and different geometrical shapes
Emir Erdem
Red Blood Cells (RBC), also known as erythrocyts, are essential cells that are present in the blood of every vertebrate. Because of their hemoglobin protein content, they carry oxygen to the cells and perform a vital function. Due to their complex shapes, behavior of cells like RBCs under optical forces are not fully been discovered. In this study, the behavior of RBCs as well as other shapes under optical trap are simulated using OTGO which is a numeric toolbox utilizing geometrical optics approximation for optical calculations. As a result of the simulations, it is observed that the RBC aligns itself in a vertical configuration, parallel to the incident beam propagating towards the cell from below. Conducted static analysis showed that it is possible to stably trap a RBC in all three dimensions. The center of the trap is near the edge of the cell, where the thickness is larger. After the analysis on RBC, how well different geometrical shapes can optically be trapped are investigated by integrating different shapes modeled by spherical harmonics to OTGO. A similar static analysis is conducted on a dumbbell shape and its trapping effectiveness is compared with an ellipsoid. A dumbbell shape can effectively be trapped in the horizontal plane similar to an ellipsoid, but in the light propagation direction, it is more challenging to trap the shape and it requires modifications on optical properties of the setup. The aim of this study after this point is to optimize the optical force calculations by training a neural network model and to apply flow conditions to cells.