
 Jan Wehr from the University of Arizona, Tucson (AZ), USA, will visit the Soft Matter Lab from 27 May 2019 till 4 June 2019.
Jan Wehr from the University of Arizona, Tucson (AZ), USA, will visit the Soft Matter Lab from 27 May 2019 till 4 June 2019.
Tag: Jan Wehr
Phototactic Robot Tunable by Sensorial Delays published in Phys. Rev. E
Tuning phototactic robots with sensorial delays (Editors’ suggestion)
Maximilian Leyman, Freddie Ogemark, Jan Wehr & Giovanni Volpe
Physical Review E 98(26), 052606 (2018)
DOI: 10.1103/PhysRevE.98.052606
arXiv: 1807.11765
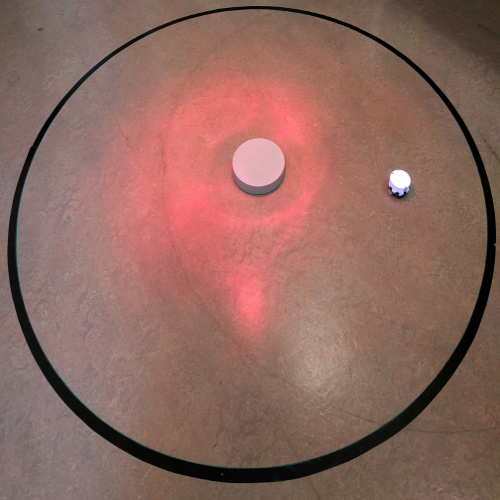
The presence of a delay between sensing and reacting to a signal can determine the long-term behavior of autonomous agents whose motion is intrinsically noisy.
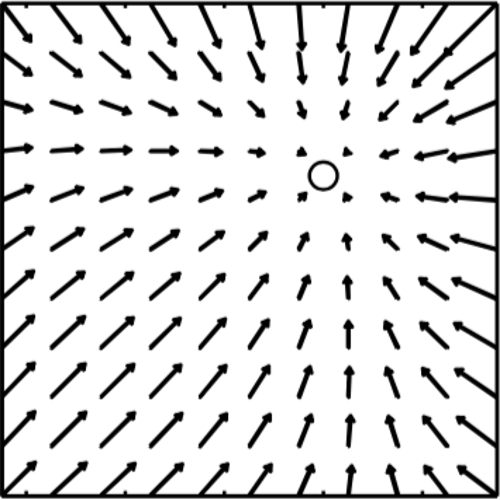
In a previous work [M. Mijalkov, A. McDaniel, J. Wehr, and G. Volpe, Phys. Rev. X 6, 011008 (2016)], we have shown that sensorial delay can alter the drift and the position probability distribution of an autonomous agent whose speed depends on the illumination intensity it measures. Here, using theory, simulations, and experiments with a phototactic robot, we generalize this effect to an agent for which both speed and rotational diffusion depend on the illumination intensity and are subject to two independent sensorial delays. We show that both the drift and the probability distribution are influenced by the presence of these sensorial delays. In particular, the radial drift may have positive as well as negative sign, and the position probability distribution peaks in different regions depending on the delay.
Furthermore, the presence of multiple sensorial delays permits us to explore the role of the interaction between them.
Seminar on Langevin equation in the small mass limit by Jan Wehr from the University of Arizona, Nexus, 21 Jun 2018
Langevin equation in the small mass limit: higher order approximations
Seminar by Jan Wehr from the University of Arizona, Tucson (AZ), USA.
Abstract: We study the Langevin equation describing the motion of a particle of mass m in a potential and/or magnetic field, with state-dependent drift and diffusion. We develop a hierarchy of approximate equations for the position degrees of freedom that achieve accuracy of order m^{k/2} over finite time intervals for any positive integer k. This extends the previous work in which effective equations for the position variables were derived in the limit when the mass goes to zero. The work was done jointly with Jeremiah Birrell.
Place: Nexus, meeting room, Fysik Origo, Fysik
Time: 21 June, 2018, 11:00
Langevin Equation on a Manifold published in Ann. Henri Poincaré
Small Mass Limit of a Langevin Equation on a Manifold
Jeremiah Birrell, Scott Hottovy, Giovanni Volpe & Jan Wehr
Annales Henri Poincaré 18(2), 707—755 (2017)
DOI: 10.1007/s00023-016-0508-3
arXiv: 1604.04819
We study damped geodesic motion of a particle of mass m on a Riemannian manifold, in the presence of an external force and noise. Lifting the resulting stochastic differential equation to the orthogonal frame bundle, we prove that, as m → 0, its solutions converge to solutions of a limiting equation which includes a noise-induced drift term. A very special case of the main result presents Brownian motion on the manifold as a limit of inertial systems.
Stochastic Differential Delay Equations with Colored State-Dependent Noise published in Markov Processes and Related Fields
An SDE approximation for stochastic differential delay equations with colored state-dependent noise
Austin McDaniel, Ozer Duman, Giovanni Volpe & Jan Wehr
Markov Processes and Related Fields 22(3), 595-628 (2016)
arXiv: 1406.7287
We consider a general multidimensional stochastic differential delay equation (SDDE) with colored state-dependent noises. We approxi-mate it by a stochastic differential equation (SDE) system and calcu- late its limit as the time delays and the correlation times of the noises go to zero. The main result is proven using a theorem of convergence of stochastic integrals developed by Kurtz and Protter. The result formalizes and extends a method that has been used in the analysis of a noisy electrical circuit with delayed state-dependent noise, and may be further used as a working SDE approximation of an SDDE system modeling a real system, where noises are correlated in time and whose response to stimuli is delayed.
Review on Multiplicative Noise published in Rep. Prog. Phys.
Effective drifts in dynamical systems with multiplicative noise: A review of recent progress (Invited review)
Giovanni Volpe & Jan Wehr
Reports on Progress in Physics 79(5), 053901 (2016)
DOI: 10.1088/0034-4885/79/5/053901
arXiv: 1511.05340
Noisy dynamical models are employed to describe a wide range of phenomena. Since exact modeling of these phenomena requires access to their microscopic dynamics, whose time scales are typically much shorter than the observable time scales, there is often need to resort to effective mathematical models such as stochastic differential equations (SDEs). In particular, here we consider effective SDEs describing the behavior of systems in the limits when natural time scales become very small. In the presence of multiplicative noise (i.e. noise whose intensity depends upon the system’s state), an additional drift term, called noise-induced drift or effective drift, appears. The nature of this noise-induced drift has been recently the subject of a growing number of theoretical and experimental
studies. Here, we provide an extensive review of the state of the art in this eld. After an introduction, we discuss a minimal model of how multiplicative noise affects the evolution of a system. Next, we consider several case studies with a focus on recent experiments: the Brownian motion of a microscopic particle in thermal equilibrium with a heat bath in the presence of a diffusion gradient; the limiting behavior of a system driven by a colored noise modulated by a multiplicative feedback; and the behavior of an autonomous agent subject to sensorial delay in a noisy environment. This allows us to present the experimental results, as well as mathematical methods and numerical techniques, that can be employed to study a wide range of systems. At the end we give an application-oriented overview of future projects involving noise-induced drifts, including both theory and experiment.
Engineering of Sensorial Delay published in Phys. Rev. X
Engineering sensorial delay to control phototaxis and emergent collective behaviors
Mite Mijalkov, Austin McDaniel, Jan Wehr & Giovanni Volpe
Physical Review X 6(1), 011008 (2016)
DOI: 10.1103/PhysRevX.6.011008
arXiv: 1511.04528
Collective motions emerging from the interaction of autonomous mobile individuals play a key role in many phenomena, from the growth of bacterial colonies to the coordination of robotic swarms. For these collective behaviors to take hold, the individuals must be able to emit, sense, and react to signals. When dealing with simple organisms and robots, these signals are necessarily very elementary; e.g., a cell might signal its presence by releasing chemicals and a robot by shining light. An additional challenge arises because the motion of the individuals is often noisy; e.g., the orientation of cells can be altered by Brownian motion and that of robots by an uneven terrain. Therefore, the emphasis is on achieving complex and tunable behaviors from simple autonomous agents communicating with each other in robust ways. Here, we show that the delay between sensing and reacting to a signal can determine the individual and collective long-term behavior of autonomous agents whose motion is intrinsically noisy. We experimentally demonstrate that the collective behavior of a group of phototactic robots capable of emitting a radially decaying light field can be tuned from segregation to aggregation and clustering by controlling the delay with which they change their propulsion speed in response to the light intensity they measure. We track this transition to the underlying dynamics of this system, in particular, to the ratio between the robots’ sensorial delay time and the characteristic time of the robots’ random reorientation. Supported by numerics, we discuss how the same mechanism can be applied to control active agents, e.g., airborne drones, moving in a three-dimensional space. Given the simplicity of this mechanism, the engineering of sensorial delay provides a potentially powerful tool to engineer and dynamically tune the behavior of large ensembles of autonomous mobile agents; furthermore, this mechanism might already be at work within living organisms such as chemotactic cells.
Featured in “Focus: Sensing Delays Control Robot Swarming”, Physics 9, 13 (January 29, 2016)
Smoluchowski-Kramers Limit of SDE published in Commun. Math. Phys.
The Smoluchowski-Kramers limit of stochastic differential equations with arbitrary state-dependent friction
Scott Hottovy, Austin McDaniel, Giovanni Volpe & Jan Wehr
Communications in Mathematical Physics 336(3), 1259—1283 (2015)
DOI: 10.1007/s00220-014-2233-4
arXiv: 1404.2330
We study a class of systems of stochastic differential equations describing diffusive phenomena. The Smoluchowski-Kramers approximation is used to describe their dynamics in the small mass limit. Our systems have arbitrary state-dependent friction and noise coefficients. We identify the limiting equation and, in particular, the additional drift term that appears in the limit is expressed in terms of the solution to a Lyapunov matrix equation. The proof uses a theory of convergence of stochastic integrals developed by Kurtz and Protter. The result is sufficiently general to include systems driven by both white and Ornstein–Uhlenbeck colored noises. We discuss applications of the main theorem to several physical phenomena, including the experimental study of Brownian motion in a diffusion gradient.
Stratonovich-to-Itô Transition published in Nature Commun.

Stratonovich-to-Itô transition in noisy systems with multiplicative feedback
Giuseppe Pesce, Austin McDaniel, Scott Hottovy, Jan Wehr & Giovanni Volpe
Nature Communications 4, 2733 (2013)
DOI: 10.1038/ncomms3733
arXiv: 1206.6271
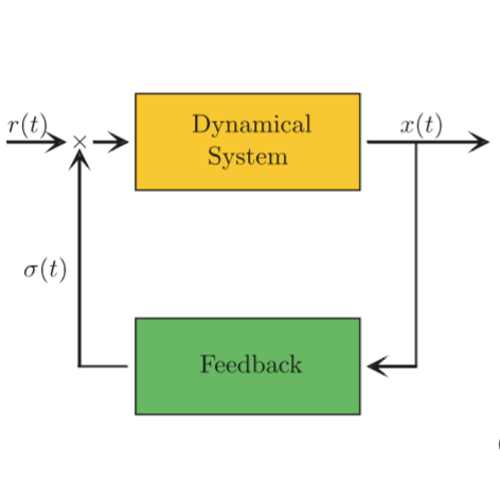
Intrinsically noisy mechanisms drive most physical, biological and economic phenomena. Frequently, the system’s state influences the driving noise intensity (multiplicative feedback). These phenomena are often modelled using stochastic differential equations, which can be interpreted according to various conventions (for example, Itô calculus and Stratonovich calculus), leading to qualitatively different solutions. Thus, a stochastic differential equation–convention pair must be determined from the available experimental data before being able to predict the system’s behaviour under new conditions. Here we experimentally demonstrate that the convention for a given system may vary with the operational conditions: we show that a noisy electric circuit shifts from obeying Stratonovich calculus to obeying Itô calculus. We track such a transition to the underlying dynamics of the system and, in particular, to the ratio between the driving noise correlation time and the feedback delay time. We discuss possible implications of our conclusions, supported by numerics, for biology and economics.
Thermophoresis Driven by Coloured Noise published in EPL

Thermophoresis of Brownian particles driven by coloured noise
Scott Hottovy, Giovanni Volpe & Jan Wehr
EPL (Europhysics Letters) 99(6), 60002 (2012)
DOI: 10.1209/0295-5075/99/60002
arXiv: 1205.1093
Brownian motion of microscopic particles is driven by collisions with surrounding fluid molecules. The resulting noise is not white, but coloured, due, e.g., to the presence of hydrodynamic memory. The noise characteristic time-scale is typically of the same order of magnitude as the inertial time-scale over which the particle’s kinetic energy is lost due to friction. We demonstrate theoretically that, in the presence of a temperature gradient, the interplay between these two characteristic time-scales can have measurable consequences on the particle’s long-time behaviour. Using homogenization theory, we analyse the infinitesimal generator of the stochastic differential equation describing the system in the limit where the two time-scales are taken to zero keeping their ratio constant and derive the thermophoretic transport coefficient, which, we find, can vary in both magnitude and sign, as observed in experiments. Studying the long-term stationary particle distribution, we show that particles accumulate towards the colder (positive thermophoresis) or the hotter (negative thermophoresis) regions depending on their physical parameters.