Emir Erdem
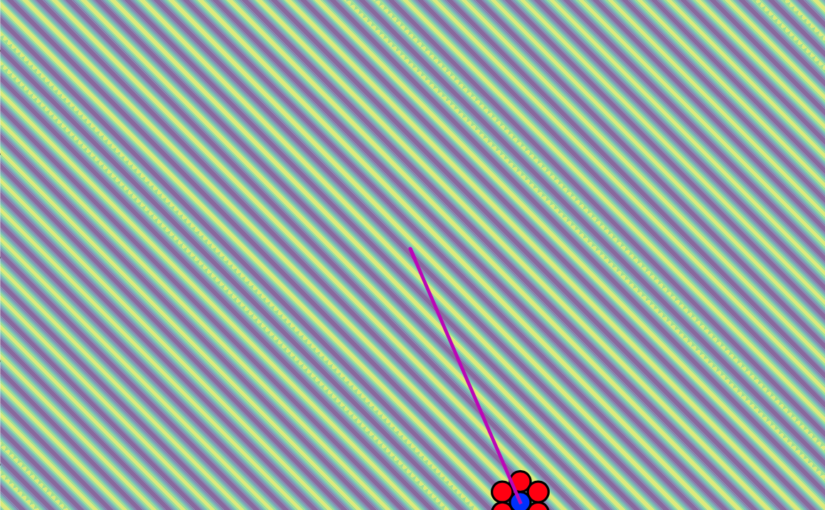
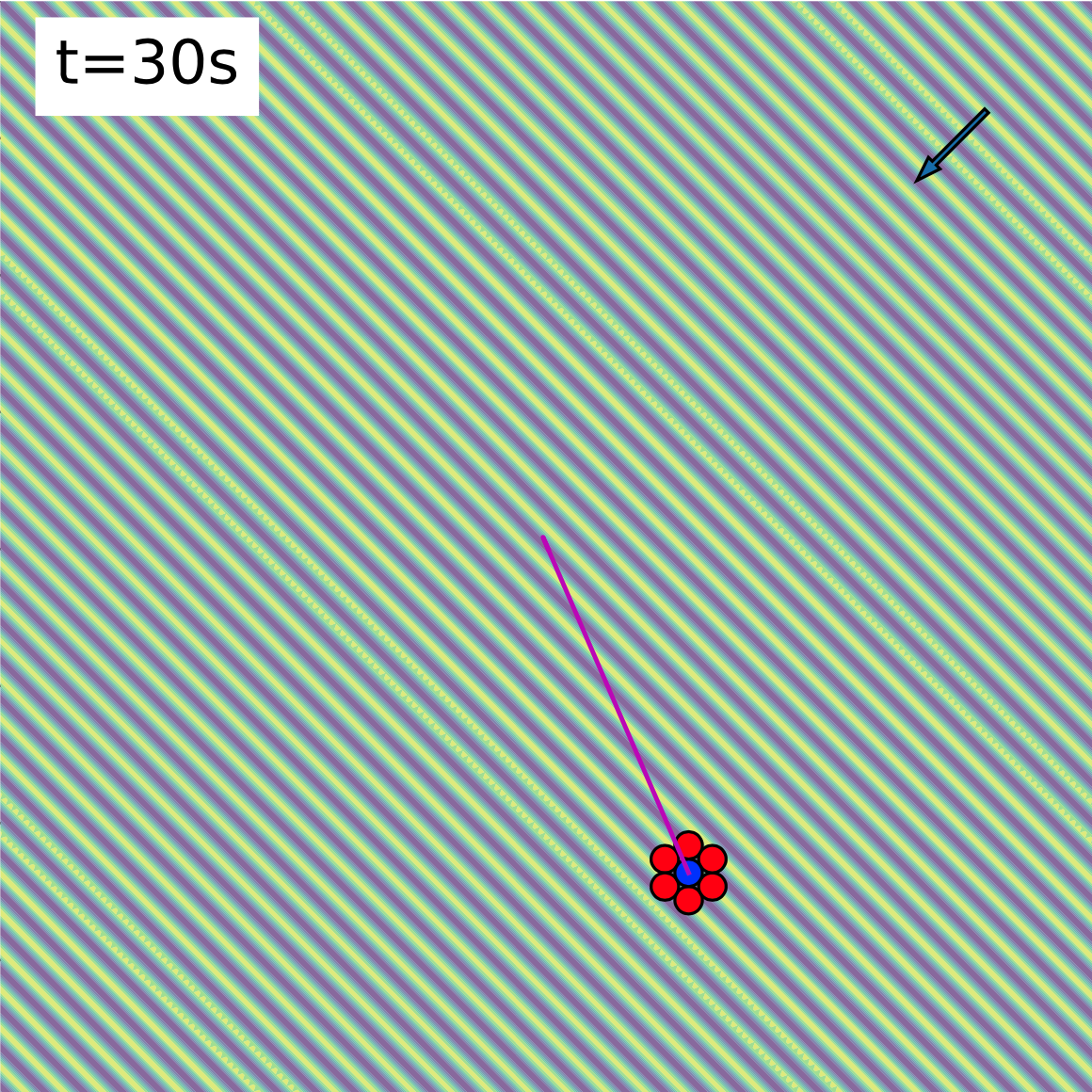
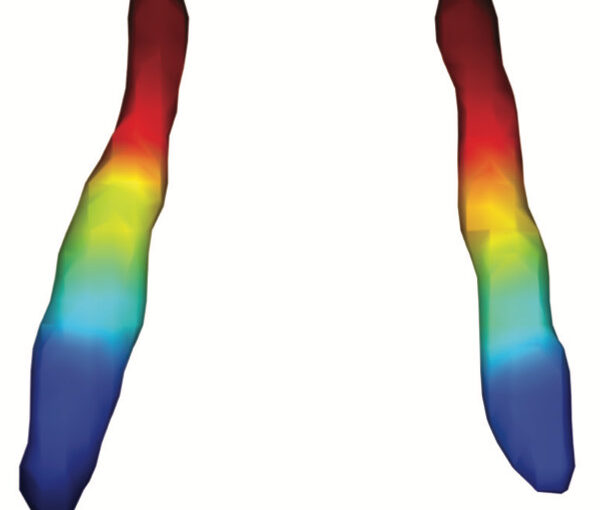
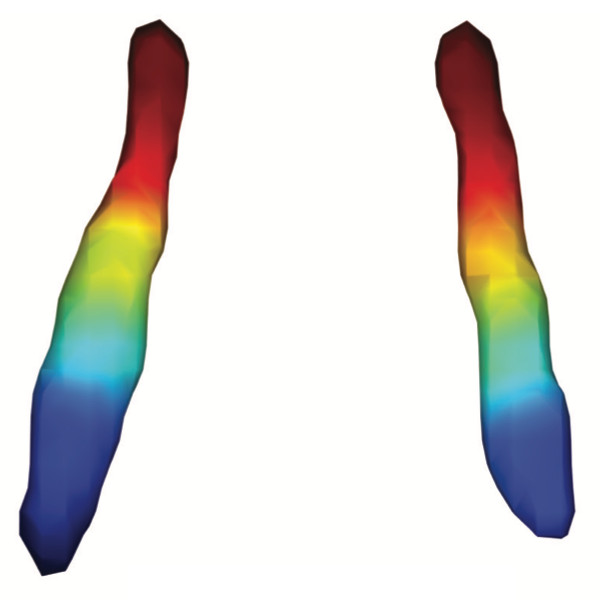
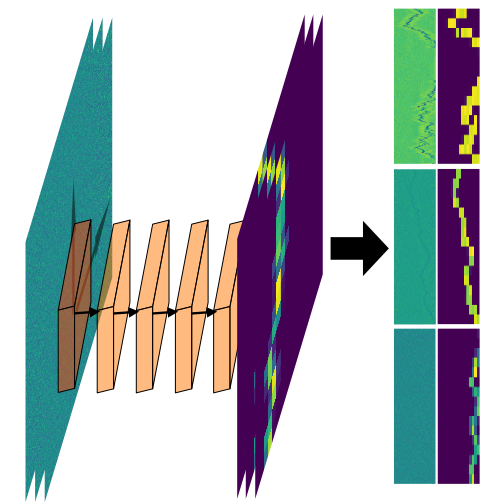
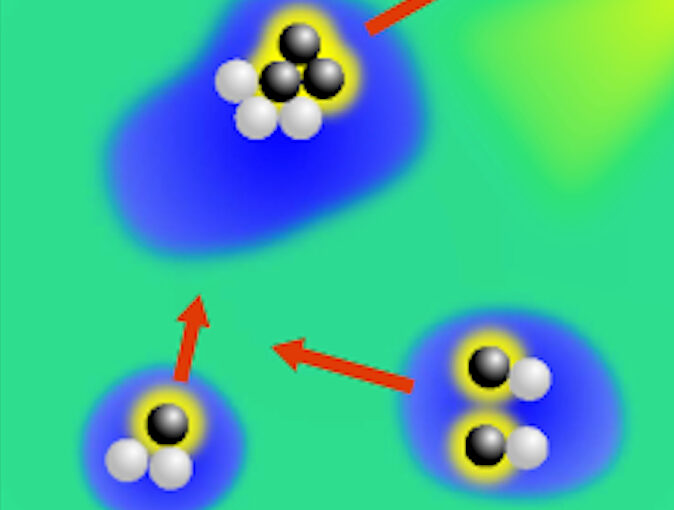
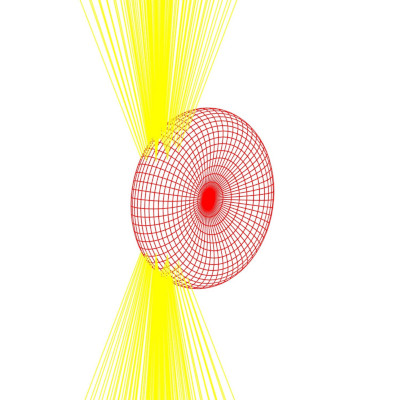
Red Blood Cells (RBC), also known as erythrocyts, are essential cells that are present in the blood of every vertebrate. Because of their hemoglobin protein content, they carry oxygen to the cells and perform a vital function. Due to their complex shapes, behavior of cells like RBCs under optical forces are not fully been discovered. In this study, the behavior of RBCs as well as other shapes under optical trap are simulated using OTGO which is a numeric toolbox utilizing geometrical optics approximation for optical calculations. As a result of the simulations, it is observed that the RBC aligns itself in a vertical configuration, parallel to the incident beam propagating towards the cell from below. Conducted static analysis showed that it is possible to stably trap a RBC in all three dimensions. The center of the trap is near the edge of the cell, where the thickness is larger. After the analysis on RBC, how well different geometrical shapes can optically be trapped are investigated by integrating different shapes modeled by spherical harmonics to OTGO. A similar static analysis is conducted on a dumbbell shape and its trapping effectiveness is compared with an ellipsoid. A dumbbell shape can effectively be trapped in the horizontal plane similar to an ellipsoid, but in the light propagation direction, it is more challenging to trap the shape and it requires modifications on optical properties of the setup. The aim of this study after this point is to optimize the optical force calculations by training a neural network model and to apply flow conditions to cells.