Theo Berglin joined the Soft Matter Lab on 21 January 2019.
Theo Berglin is a Master student in the Complex Adaptive Systems Master at Chalmers University of Technology.
He will work on his Master thesis on the development of Braph, the software for brain connector analysis developed by the Soft Matter Lab in collaboration with Karolinska Institutet.
Adam Liberda joined the Soft Matter Lab on 21 January 2019.
Adam Liberda is a Master student in the Complex Adaptive Systems Master at Chalmers University of Technology.
He will work on his Master thesis on the development of Braph, the software for brain connector analysis developed by the Soft Matter Lab in collaboration with Karolinska Institutet.
Effective Drifts in Generalized Langevin Systems
Seminar by Soon Hoe Lim
from Nordita, Stockholm, Sweden, EU
Generalized Langevin equations (GLEs) are stochastic integro-differential equations commonly used as models in non-equilibrium statistical mechanics to describe the dynamics of a particle coupled to a heat bath. From modeling point of view, it is often desirable to derive effective mathematical models, in the form of stochastic differential equations (SDEs), to capture the essential dynamics of the systems. In this talk, we consider effective SDEs describing the behavior of a large class of generalized Langevin systems in the limits when natural time scales become very small. It turns out that additional drift terms, called noise-induced drifts, appear in the effective SDEs. We discuss recent progress on the phenomena of noise-induced drift in these systems. This is joint work with Jan Wehr and Maciej Lowenstein.
Place: Soliden 3rd floor Time: 12 December 2018, 13:00
Panel on the 2018 Nobel Prize in Physics Friday, December 7, 15:00 – 18:00
Oscar Klein hall, Albanova, Roslagstullsbacken 21, Stockholm
Albanova, Stockholm’s center for Physics, Astronomy and Biotechnology cordially organizes a panel discussion about this year’s Nobel Prize in Physics, followed by a social gathering with drinks and snacks.
Panel Members: Felix Ritort, University of Barcelona Cord Arnold, Lunds University Giovanni Volpe, Göteborg University Valdas Pasiskevicius, KTH Royal Institute of Technology
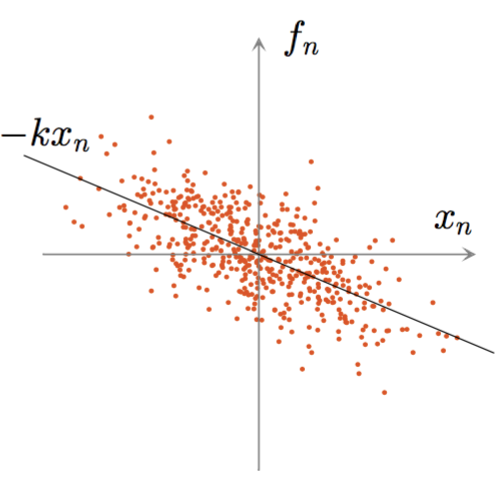
High-Performance Reconstruction of Microscopic Force Fields from Brownian Trajectories
High-Performance Reconstruction of Microscopic Force Fields from Brownian Trajectories Laura Pérez García, Jaime Donlucas Pérez, Giorgio Volpe, Alejandro V. Arzola & Giovanni Volpe
Nature Communications 9, 5166 (2018)
doi: 10.1038/s41467-018-07437-x
arXiv: 1808.05468
The accurate measurement of microscopic force fields is crucial in many branches of science and technology, from biophotonics and mechanobiology to microscopy and optomechanics. These forces are often probed by analysing their influence on the motion of Brownian particles. Here we introduce a powerful algorithm for microscopic force reconstruction via maximum-likelihood-estimator analysis (FORMA) to retrieve the force field acting on a Brownian particle from the analysis of its displacements. FORMA estimates accurately the conservative and non-conservative components of the force field with important advantages over established techniques, being parameter-free, requiring ten-fold less data and executing orders-of-magnitude faster. We demonstrate FORMA performance using optical tweezers, showing how, outperforming other available techniques, it can identify and characterise stable and unstable equilibrium points in generic force fields. Thanks to its high performance, FORMA can accelerate the development of microscopic and nanoscopic force transducers for physics, biology and engineering.
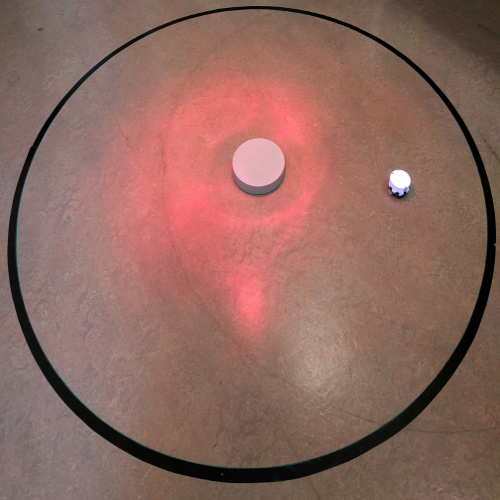
Tuning phototactic robots with sensorial delays (Editors’ suggestion)
Maximilian Leyman, Freddie Ogemark, Jan Wehr & Giovanni Volpe
Physical Review E 98(26), 052606 (2018)
DOI: 10.1103/PhysRevE.98.052606
arXiv: 1807.11765
The presence of a delay between sensing and reacting to a signal can determine the long-term behavior of autonomous agents whose motion is intrinsically noisy.
In a previous work [M. Mijalkov, A. McDaniel, J. Wehr, and G. Volpe, Phys. Rev. X 6, 011008 (2016)], we have shown that sensorial delay can alter the drift and the position probability distribution of an autonomous agent whose speed depends on the illumination intensity it measures. Here, using theory, simulations, and experiments with a phototactic robot, we generalize this effect to an agent for which both speed and rotational diffusion depend on the illumination intensity and are subject to two independent sensorial delays. We show that both the drift and the probability distribution are influenced by the presence of these sensorial delays. In particular, the radial drift may have positive as well as negative sign, and the position probability distribution peaks in different regions depending on the delay.
Furthermore, the presence of multiple sensorial delays permits us to explore the role of the interaction between them.
Active Matter Alters the Growth Dynamics of Coffee Rings Agnese Callegari, Tugba Andaç, Pascal Weigmann, Sabareesh K. Velu, Erçag Pince, Giorgio Volpe & Giovanni Volpe
LAOP – Latin America Optics & Photonics Congress, Lima, Peru
12-15 November 2018
Abstract: We show that bacterial mobility starts playing a major role in determining the growth dynamics of the edge of drying droplets, as the droplet evaporation rate slows down.
Microscopic Engine Powered by Critical Demixing
Falko Schmidt, Alessandro Magazzù, Agnese Callegari, Luca Biancofiore, Frank Cichos & Giovanni Volpe LAOP – Latin America Optics & Photonics Congress, Lima, Peru
12-15 November 2018
Abstract: An optically trapped absorbing microsphere in a sub-critical mixture rotates around the optical trap thanks to diffusiophoretic propulsion, which can be controlled by adjusting the optical power, the temperature, and the criticality of the mixture.

 Martin Selin joined the Soft Matter Lab on 21 January 2019.
Martin Selin joined the Soft Matter Lab on 21 January 2019.