Yanuar is a master student in Complex Adaptive Systems at Chalmers University of Technology.
During his time at the Soft Matter Lab, he will focus on implementing deep learning techniques to predict delay in Brownian motion with delayed feedback.
Yanuar is a master student in Complex Adaptive Systems at Chalmers University of Technology.
During his time at the Soft Matter Lab, he will focus on implementing deep learning techniques to predict delay in Brownian motion with delayed feedback.
Lukas Niese defended his Master thesis in Physics at the Technische Universität Dresden on 17 January 2022. Congrats!
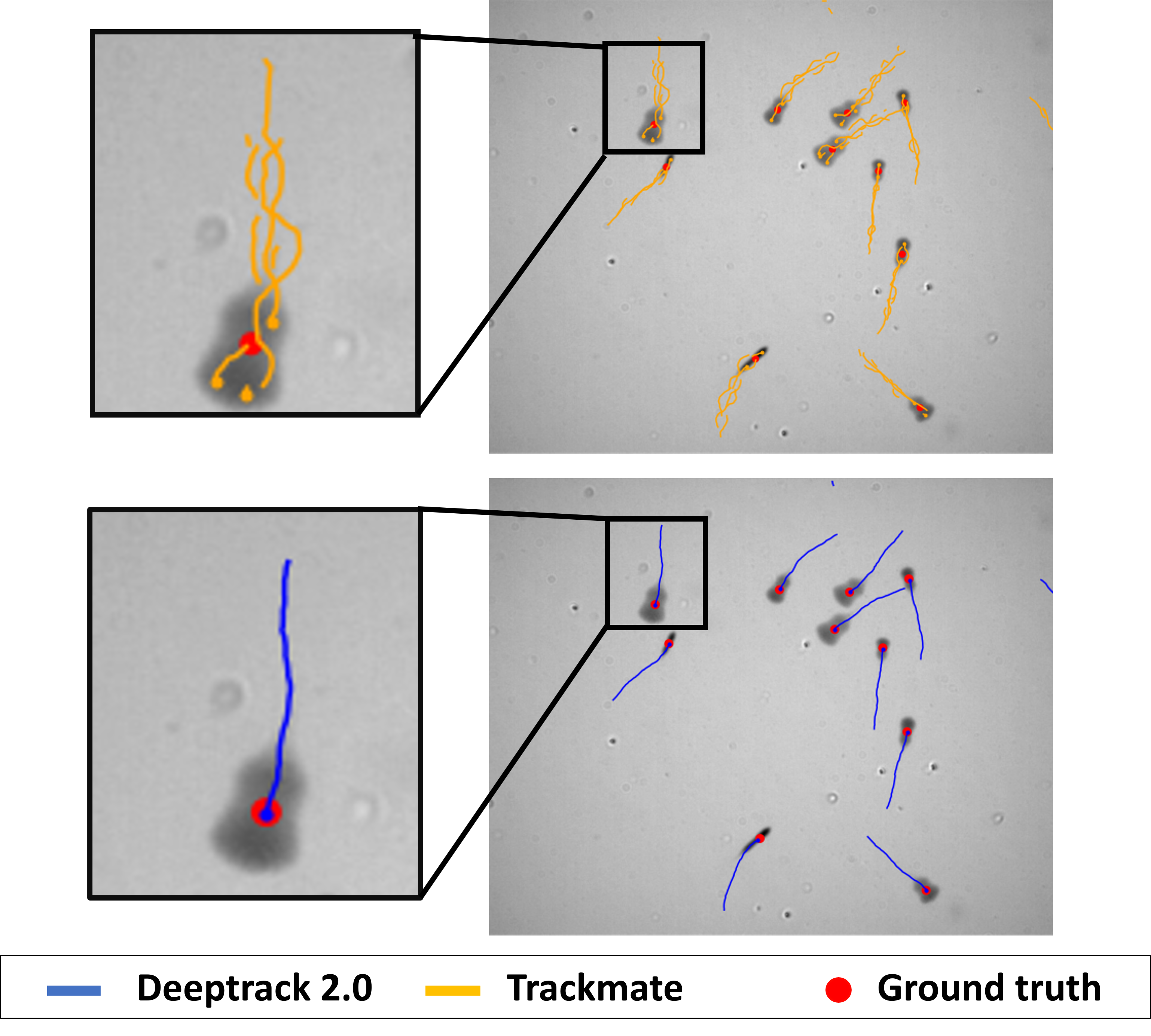
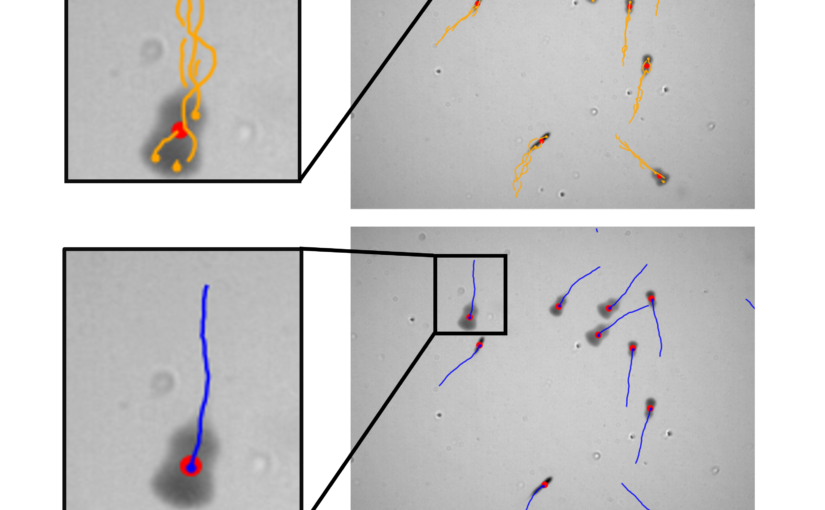
Deep learning has recently become a powerful instrument, enhancing research in many fields and profiting from abundant availability of manifold data sets. In active matter research, medicine and biology there is huge demand of robust and accurate methods to track and analyse micro scale particles and cells in microscopy images. The Pyhton based software Deeptrack 2.0 offers a basic toolkit to build customized deep learning methods for particle localization, classification and tracking. In this project Deeptrack 2.0 was used to track marine microorganisms and investigate their motion in response to chemical stimulants, known as chemotaxis. In addition, the accuracy of particle localization and classification was measured by three different benchmark tests, which imitated shapes and movement of real microorganisms. The results were compared with the performance ofthe algorithmic standard method Trackmate by Fiji ImageJ. Deeptrack 2.0 has shown a significantly better performance for particles with complex shapes and with time varying appearance were to be tacked. However Trackmate is slightly more accurate in locating small particles appearing in Gaussian intensity distribution. In the experimental part two test assays have been developed and proven a facile and robust way to study chemoattraction in the autotrophic green alga Dunaliella tertiolecta. Deeptrack was successfully applied create and analyze the cell trajectories according to velocity and spatial distribution in individuals. Based on the developed combination of experiment and computational analysis, further investigations can be carried out to elucidate the chemical and ecological nature of chemotaxis in Dunaliella tertiolecta.
Adviser: Prof. Giovanni Volpe
Examiner: Prof. Alexander Eychmüller (TU Dresden)
Date: 17 January 2022
Time: 17:00
Place: TU Dresden and Online via Zoom
The book is available for the students of Gothenburg University and Chalmers University of Technology through the library service of each institution.
The example codes presented in the book can be found on GitHub.
Links
@ IOP Publishing
Citation
Aykut Argun, Agnese Callegari & Giovanni Volpe. Simulation of Complex Systems. IOP Publishing, 2022.
ISBN: 9780750338417 (Hardback) 9780750338431 (Ebook).

Niphredil is a master student in Physics at the University of Gothenburg.
During her time at the Soft Matter Lab, she will investigate the light-controlled self-organisation of active particles.

John is a master student in Physics at the University of Gothenburg.
During his time at the Soft Matter Lab, he will investigate the light-controlled self-organisation of active particles.

Hari Prakash has a Master degree in Advanced Robotics from Queen Mary University of London, United Kingdom.
In his PhD, he will focus on the development of soft robots to study collective emergent behaviours in soft active matter systems.
Meera Srikrishna, Rolf A. Heckemann, Joana B. Pereira, Giovanni Volpe, Anna Zettergren, Silke Kern, Eric Westman, Ingmar Skoog and Michael Schöll
Frontiers of Computational Neuroscience 15, 785244 (2022)
doi: 10.3389/fncom.2021.785244
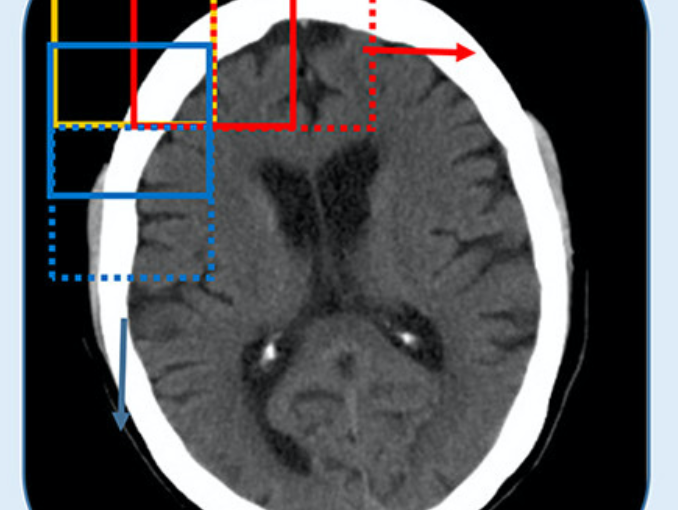
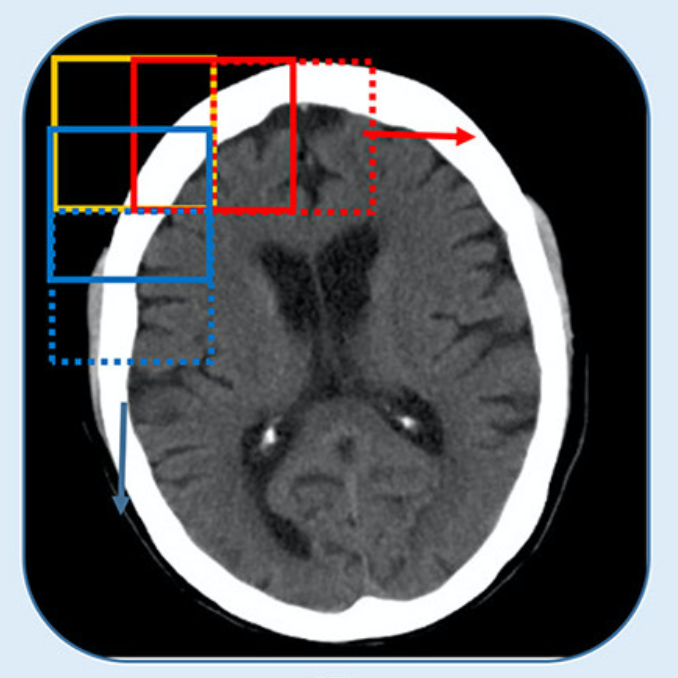
Brain tissue segmentation plays a crucial role in feature extraction, volumetric quantification, and morphometric analysis of brain scans. For the assessment of brain structure and integrity, CT is a non-invasive, cheaper, faster, and more widely available modality than MRI. However, the clinical application of CT is mostly limited to the visual assessment of brain integrity and exclusion of copathologies. We have previously developed two-dimensional (2D) deep learning-based segmentation networks that successfully classified brain tissue in head CT. Recently, deep learning-based MRI segmentation models successfully use patch-based three-dimensional (3D) segmentation networks. In this study, we aimed to develop patch-based 3D segmentation networks for CT brain tissue classification. Furthermore, we aimed to compare the performance of 2D- and 3D-based segmentation networks to perform brain tissue classification in anisotropic CT scans. For this purpose, we developed 2D and 3D U-Net-based deep learning models that were trained and validated on MR-derived segmentations from scans of 744 participants of the Gothenburg H70 Cohort with both CT and T1-weighted MRI scans acquired timely close to each other. Segmentation performance of both 2D and 3D models was evaluated on 234 unseen datasets using measures of distance, spatial similarity, and tissue volume. Single-task slice-wise processed 2D U-Nets performed better than multitask patch-based 3D U-Nets in CT brain tissue classification. These findings provide support to the use of 2D U-Nets to segment brain tissue in one-dimensional (1D) CT. This could increase the application of CT to detect brain abnormalities in clinical settings.
Mathias is a master student in Physics at the University of Gothenburg.
During his time at the Soft Matter Lab, he will focus on the simulation of an intracavity optical tweezers with the help of neural networks.

Angelo is a master student in Complex Adaptive Systems at Chalmers University of Technology.
During his time at the Soft Matter Lab, he will investigate the behaviour of active matter via experiments with toy robots (HEXBUG nano®).
CORDIS, the Community Research and Development Information Service of the European Commission, recently covered Giovanni Volpe’s ComplexSwimmers ERC-StG grant in a news:
Throwing down the scientific gauntlet to assess methods for anomalous diffusion.
The article highlights the joint results obtained by three EU-backed research projects (NOQIA, OPTOlogic and ComplexSwimmers) dealing with anomalous diffusion.