Influence of Sensorial Delay on Clustering and Swarming
Rafal Piwowarczyk, Martin Selin, Thomas Ihle & Giovanni Volpe
Physical Review E 100(1), 012607 (2019)
doi: 10.1103/PhysRevE.100.012607
arXiv: 1803.06026
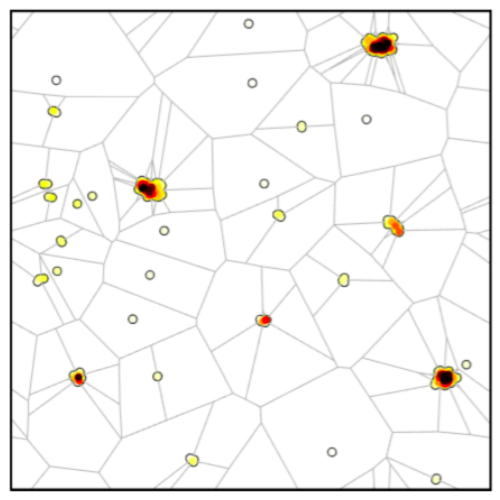
We show that sensorial delay alters the collective motion of self-propelling agents with aligning interactions: In a two-dimensional Vicsek model, short delays enhance the emergence of clusters and swarms, while long or negative delays prevent their formation. In order to quantify this phenomenon, we introduce a global clustering parameter based on the Voronoi tessellation, which permits us to efficiently measure the formation of clusters. Thanks to its simplicity, sensorial delay might already play a role in the organization of living organisms and can provide a powerful tool to engineer and dynamically tune the behavior of large ensembles of autonomous robots.