Yanuar Rizki Pahlevi defended his Master thesis in MPCAS at the Chalmers University of Technology on 9 June 2022 at 17:00. Congrats!
Title: Deep Learning for Optical Tweezers. DeepCalib Implementation for Brownian Motion with Delayed Feedback
Brownian motion with delayed feedback theoretically studied to take control of Brownian particle movement’s direction. One can use optical tweezers to implement delayed feedback. Calibrating optical tweezers with delay implemented is not an easy job. In this study, Deep learning technique using Long Short Term Memory (LSTM) layer as main composition of the model to calibrate the trap stiffness and to measure the delayed feedback employed, using the trapped particle trajectory as an input. We demonstrate that this approach is outperforming variance methods in order to calibrate stiffness, also outperforming approximation method to measure the delay in harmonic trap case.
Name of the master programme: MPCAS – Complex Adaptive Systems Examiner: Giovanni Volpe Supervisor: Aykut Argun Opponent: Ivan Gentile Japiassu
(Image by A. Callegari)Santhosh Shivan Gurumurthy defendeded his Master thesis in MPCAS at the Chalmers University of Technology on 2 June 2022 at 19:00. Congrats!
Title: Digital video microscopy using deep learning
Abstract:
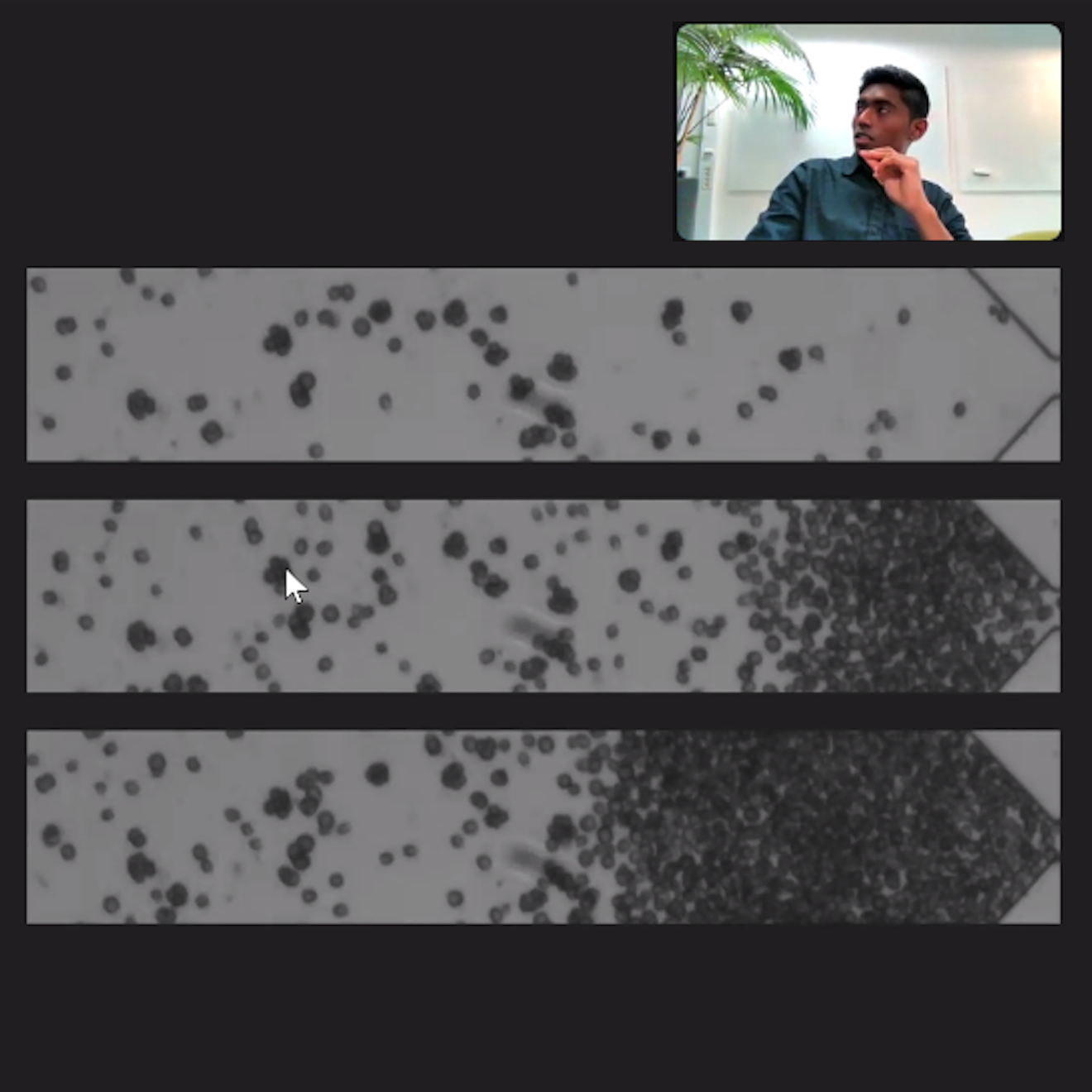
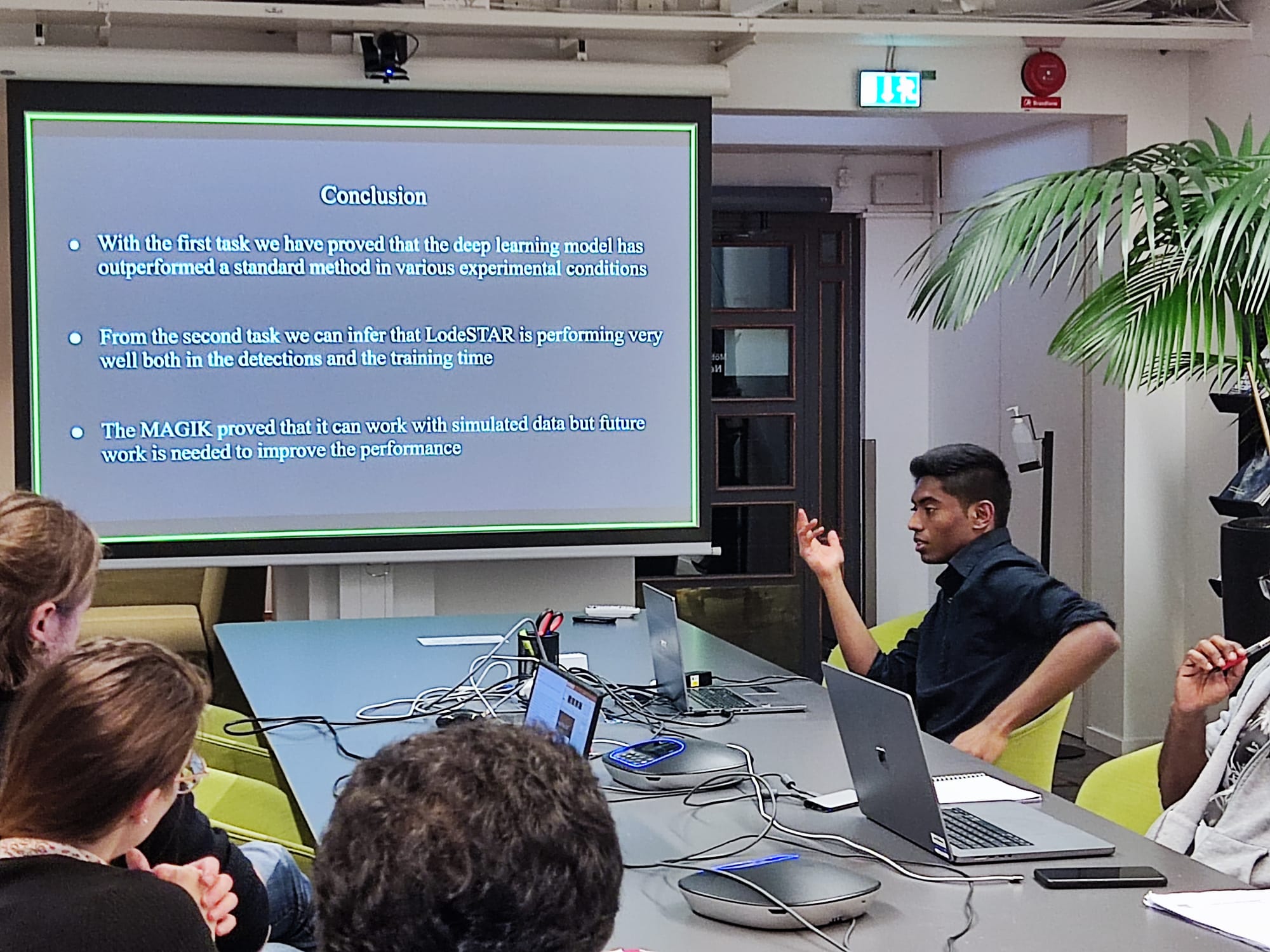
Particle tracking is essential in various fields of science, from study of cells in biology to studying particle dynamics in physics. The standard classical methods are algorithmic in nature, requiring heavy manual work to tweak the parameter to various conditions and tasks. In this project, we try to apply four such methods to different particle tracking tasks and show that these are better alternatives to standard methods. We use Deeptrack as the base framework for all our tasks. We show that CNN can track a single Janus particle suspended in a liquid and outperforms a standard method called radial center method especially under noisy and unsymmetrical particle conditions. We then demonstrate how the LodeSTAR algorithm outperforms the YOLO algorithm in tracking the centers of multiple particles in an image. Subsequently, we apply a method called MAGIK (Motion Analysis through GNN Inductive Knowledge) to predict the trajectories of the particles in a video.
Name of the master programme: MPCAS – Complex Adaptive Systems Examiner: Giovanni Volpe Supervisor: Jesús Pineda Opponent: Emil Jansson
(Image by A. Callegari via Zoom)Emil Jansson defendeded his Master thesis in MPCAS at the Chalmers University of Technology on 2 June 2022 at 18:00. Congrats!
Title: Evolutionarily Emergent Foraging Strategies for Active Agents
Abstract:
Microbes, insects, birds, and mammals. Many forms of life depend on the search for food to survive. One search strategy that has been observed in nature is a levy flight, where an animal moves from area to area in long stretches to then explore the local environment. Levy flights can be described as statistical mathematical phenomena where the steps lengths of the agent’s movement follow a heavy tailed distribution. Earlier studies have shown that in certain environments, a middle ground between ballistic Levy flights and Brownian motion is more efficient than the outlier strategies. This thesis expands on those results by investigating which strategies perform best in an environment where local conditions change as one moves through space. We find that using a strategy that adapts to local conditions does not necessarily perform well if it does not consider the changing nature of the environment. We also let a neural network evolve using a genetic algorithm and let it optimize the movement of an agent which leads to efficient searches.
Name of the master programme: MPCAS – Complex Adaptive Systems Examiner: Giovanni Volpe Supervisor: Giovanni Volpe Opponent: Santhosh Shivan Gurumurthy
Isak Schwartz and William Åkvist defended their Master thesis in MPALG and MPCAS at the Chalmers University of Technology on 1 June 2022 at 16:00. Congrats!
Title: Active learning in deep convolutional neural networks for image segmentation
Subtitle:
Evaluating data-centric approaches to improving performance in seat belt localization from images
Abstract:
The sitting position and seat belt orientation of passengers in automobiles can be crucial in the event of a collision. In order to warn passengers of unsafe positions, deep learning models in the form of neural networks can be used to identify the seat belt from image data. Performance of neural networks can be increased by improving the model (model-centric approaches) or by improving the data used to train the model (data-centric approaches).
In this thesis we compare the segmentation performance gains from model-centric approaches to data-centric approaches including stratified sampling, balancing, label error reduction and active learning. Active learning is the process of iteratively choosing data points for labeling according to the expected improvement in model performance. No new model architecture was found that improved performance, but the model training time was sped up by four times without performance loss. Stratified sampling, balancing and error reduction did not improve performance.
In active learning, images to be labeled were selected according to the model’s uncertainty. Several uncertainty metrics were used, all leading to an improvement when using active learning. The best result showed that we achieved 95% and 99% of the best baseline performance using 19% and 23% less data respectively.
Name of the master programme: MPALG – Computer Science: Algorithms, Languages, and Logic, MPCAS – Complex Adaptive Systems Examiner: Giovanni Volpe Supervisor: Tomas Björklund, Sheng Huang (Volvo Cars Corporation) Opponent: Rohini Bisht, Selomie Kindu
Calle Andersson, Jesper Bergquist, Karim Hasseli, Wilhelm Henriksson, Max Jisonsund and Amandus Reimer presenting their bachelor thesis. (Photo by L. Natali.)Calle Andersson, Jesper Bergquist, Karim Hasseli, Wilhelm Henriksson, Max Jisonsund and Amandus Reimer defended their Bachelor Thesis at Chalmers University of Technology on 25 May 2022. Congrats!
Title: Simuleringsprogram för epidemihantering med hjälp av artificiell intelligens
Sammandrag:Under människans historia har epidemier förekommit med viss regelbundenhet och varit orsak till stora förluster av människoliv. En sjukdom med utbredd spridning bland människor kan benämnas som en epidemi. Vad som i huvudsak avgör vilket hot en epidemi utgör mot ett samhälle är hur lätt det är för sjukdomen att sprida sig vidare, hur dödlig den är och hur länge en smittad individ är sjuk. Med syfte att ge en användare utan programmeringskunskaper möjlighet att undersöka dessa fenomen i en simulerad miljö påbörjades detta arbete. Slutresultatet är ett program, som simulerar smittspridningen i ett samhälle, som en användare kan köra via sin webbläsare. I programmet kan en användare observera och kontrollera ett simulerat samhälle, och bland annat ställa in flera parametrar relaterade till sjukdomen och samhällsutformningen. Användaren kan även välja att låta en sjukdom spridas fritt eller aktivera någon bekämpningsstrategi, vars mål är att minimera sjukdomens spridning genom olika metoder. En av dessa strategier använder sig av artificiell intelligens för att försöka minska smittspridningen. Det finns två versioner av programmet. Den första ger användaren möjligheten att visuellt se hur en sjukdom sprider sig i ett samhälle, och den andra versionen möjliggör djupare analys av simuleringar med valda parametrar. Ett antal fallstudier har även genomförts för att observera skillnader i olika simuleringar.
Abstract: Throughout history, epidemics have appeared with some regularity and they have lead to the loss of many human lives. When a disease spreads among many humans in a given population it can be defined as an epidemic. The threat of a disease mainly depends on its transmission rate, lethality and duration of infection in a host. In this project, we develop a simulation program for the evolution of an epidemic in a given society. The simulation program is web-based and designed for use by individuals without prior knowledge of programming. In the simulation program, the user has the freedom to modify some parameters related to an epidemic, such as population size, infection rate, recovery rate and death rate to name a few. The user can also choose between allowing the disease to spread freely or activating a containment strategy. One of these uses artificial intelligence. There are two different versions of the simulation program; the first version creates a visualization of how an epidemic evolves over time, and the second version enables a deeper analysis of a simulation with the chosen parameters. A number of case studies have been made to observe the contrasts between different simulations.
Supervisors: Laura Natali and Giovanni Volpe, Department of Physics, University of Gothenburg
Examiner: Lena Falk, Department of Physics, Chalmers University of Technology
August Kälvesten, Richard Blücher, Vilhelm Hedquist, Andreas Bauner, Adam Törnkvist, Eric Dat Le presenting their bachelor thesis. (Photo by A. Callegari.)August Kälvesten, Richard Blücher, Vilhelm Hedquist, Andreas Bauner, Adam Törnkvist, Eric Dat Le defended their Bachelor Thesis at Chalmers University of Technology on 25 May 2025. Congrats!
Title: Can slower predators catch faster swarming prey?
A study of systems where faster swarming prey interact with slower predators through simulation
Title: Kan långsammare rovdjur fånga snabbare svärmande byten?
En undersökning av system där snabbare svärmande byten interagerar med långsammare rovdjur genom simulation
Abstract: This project examined how predators can catch prey in a predator-prey system where the predators have a lower speed than their swarming prey. The investigated factors were the varied angular velocity of prey and predator, complex environment, and several cooperating predators. This was done through simulations based on the Vicsek model where a base model was modified for each of the investigated factors. When varied angular velocity was investigated it was found that the angular velo- city of the predator didn’t have a large effect on the numbers of prey captured, but what had an effect was the angular velocity of the prey. That could be explained by the predators traveling towards the prey head-on and the prey not being able to turn away fast enough. For complex environments, it was shown that an increased radius and number of obstacles in the environment led to increased numbers of prey caught. This is contradictory to the phenomenon in nature and could be explained by limitations in the model. Finally, when many cooperating predators were introduced, it was found that groups of three or four predators were required for prey to be caught. When many predators were introduced, more such groups could be created and therefore capture more prey. Although only three uncountable factors that govern predator-prey systems have been investigated, there are some indications that slower predators can catch faster swarming prey.
Sammandrag: I detta projekt undersöktes hur rovdjur kan fånga byten i ett rovdjur-bytessystem där rovdjuren har lägre fart än dess svärmande byten. De faktorer som undersökts är varierande vinkelhastighet hos byten och rovdjur, komplexa miljöer, och flera sam- arbetande rovdjur. Detta gjordes genom simuleringar baserat på Vicsek-modellen där en basmodell modifierades för varje faktor som undersöktes. Då varierande vin- kelhastighet undersöktes noterades det att rovdjurets vinkelhastighet inte har någon större inverkan på antalet fångade byten, utan det var snarare bytesdjurens vinkel- hastighet som hade störst inverkan. Det kunde förklaras av att rovdjuren lyckades fånga byten då de färdades rakt mot varandra och bytesdjuret inte kunde svänga av tillräckligt snabbt. För komplexa miljöer visades att en ökad radie och antal hinder i miljön ökade antalet fångade byten. Detta var motsägande observerade fenomen i naturen och kunde förklaras av begränsningar i modellen. Slutligen observerades, när flera samarbetande rovdjur undersöktes, att det krävdes grupper av tre eller fyra rovdjur för att byten skall fångas. Då många rovdjur introducerades kunde flera sådana grupper skapas och därför fånga fler byten. Trots att endast tre av de oräkneliga faktorer som styr rovdjur-bytessystem i verkligheten har undersökts kan vissa indikationer finnas på att långsammare rovdjur kan fånga snabbare svärmande byten.
Lukas Niese defended his Master thesis in Physics at the Technische Universität Dresden on 17 January 2022. Congrats!
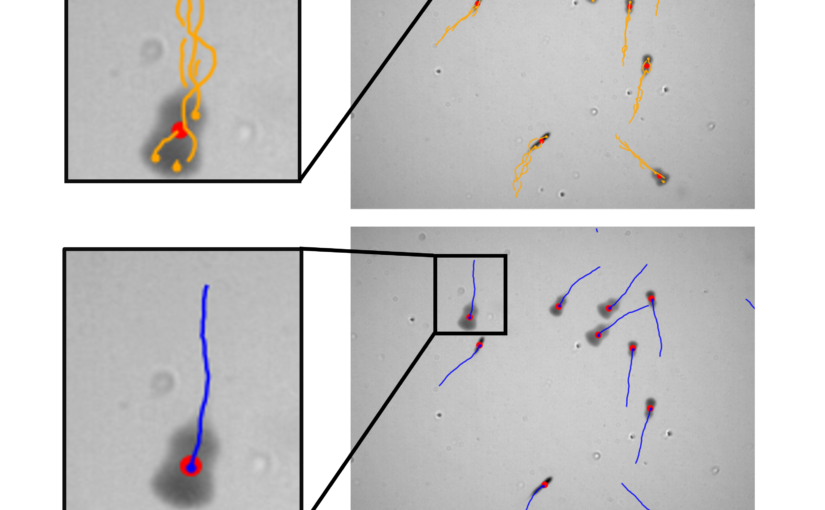
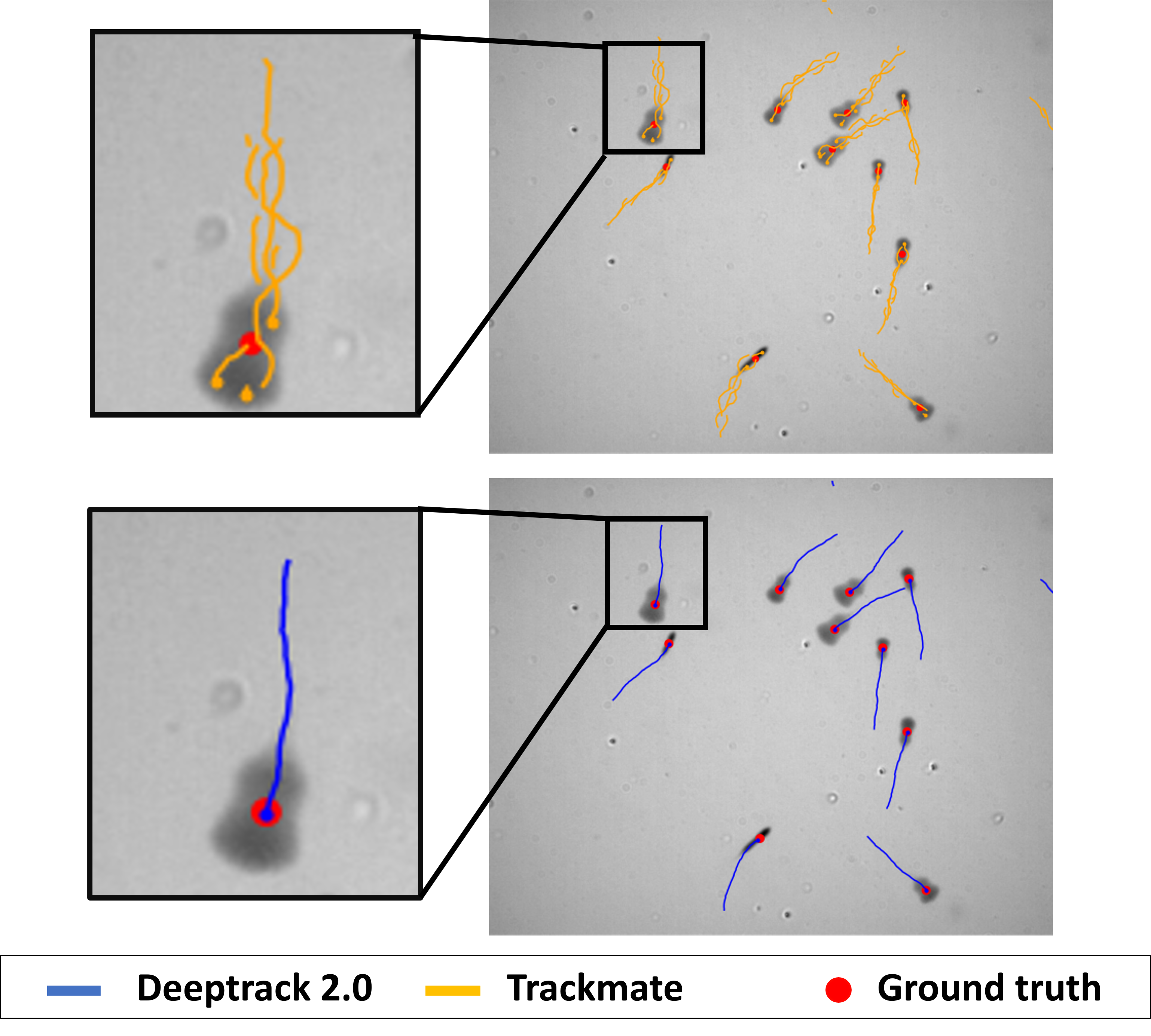
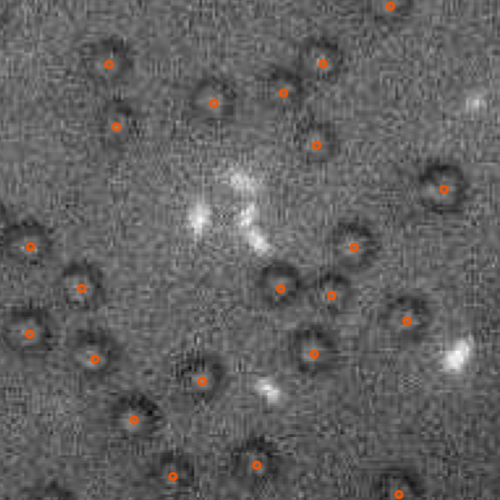
(Image from Lukas Niese’s Master Thesis)Title: Application of Deep Learning for Investigation of Chemotactic Behaviour in Marine Microorganisms
Deep learning has recently become a powerful instrument, enhancing research in many fields and profiting from abundant availability of manifold data sets. In active matter research, medicine and biology there is huge demand of robust and accurate methods to track and analyse micro scale particles and cells in microscopy images. The Pyhton based software Deeptrack 2.0 offers a basic toolkit to build customized deep learning methods for particle localization, classification and tracking. In this project Deeptrack 2.0 was used to track marine microorganisms and investigate their motion in response to chemical stimulants, known as chemotaxis. In addition, the accuracy of particle localization and classification was measured by three different benchmark tests, which imitated shapes and movement of real microorganisms. The results were compared with the performance ofthe algorithmic standard method Trackmate by Fiji ImageJ. Deeptrack 2.0 has shown a significantly better performance for particles with complex shapes and with time varying appearance were to be tacked. However Trackmate is slightly more accurate in locating small particles appearing in Gaussian intensity distribution. In the experimental part two test assays have been developed and proven a facile and robust way to study chemoattraction in the autotrophic green alga Dunaliella tertiolecta. Deeptrack was successfully applied create and analyze the cell trajectories according to velocity and spatial distribution in individuals. Based on the developed combination of experiment and computational analysis, further investigations can be carried out to elucidate the chemical and ecological nature of chemotaxis in Dunaliella tertiolecta.
Adviser: Prof. Giovanni Volpe Examiner: Prof. Alexander Eychmüller (TU Dresden) Date: 17 January 2022 Time: 17:00 Place: TU Dresden and Online via Zoom
Thomas Suphona defended his Master thesis in Physics at the Chalmers University of Technology on 27 september 2021. Congrats!
(Image from a composition of screenshots during Thomas Suphona’s Master Thesis defense)Title: Collective behaviors of autonomous robots in complex environment
Collective behaviours or collective motion is a common phenomena in nature where multiple organisms in a system undergo ordered movements. This can be observed in different scales, from the microscale with bacteria swarming to the macro scale with for example flocks of birds, schools of fish and even human crowds and car traffic.
All these systems are made up by self-propelling agents who are able to take up energy from their environment and converting it to directed motion.
Because of this
property of self-propulsion, their dynamics cannot be explained using conventional methods. Although significant efforts have been made in trying to explain collective behaviours from different perspective, using simulation tools and study systems in different scales as mentioned before, the subject is not as widely studied from the macroscale, especially with artificially made systems. In this thesis, a macroscale system was design with the purpose of providing conditions for collective behaviours to emerge and study how the behaviours changes depending on the surrounding conditions. Battery powered robots were used as self-propelling agents and they were placed in a confined space filled with obstacles. It was shown that when the number of robot and obstacles inside the system is large, the robots movements were significantly restricted. The weight of the obstacles do also affect the average motions of the robots where heavier obstacles hinders the robots by creating blockage leading to the robots having lower average velocity. At certain configuration of the parameters, the robots showed collective behaviours where they for example form channels between the obstacles, making ”roads” for other robots to reuse, or helping each other to move by pushing away chunks of obstacles or pushing onto each other. Even though these robots are simple agents, they have manage to manifest cooperative actions towards other agents.
Supervisor: Giovanni Volpe and Alessandro Magazzú Examiner: Giovanni Volpe Opponent: David Fitzek
Digital video microscopy enhanced by deep learningSaga Helgadottir defended her PhD Thesis in Physics on June 16, 2021. Congrats!
The disputation took place at 9 a.m. digitally via Zoom. A link to the Zoom meeting was published the day before dissertation on the GU website.
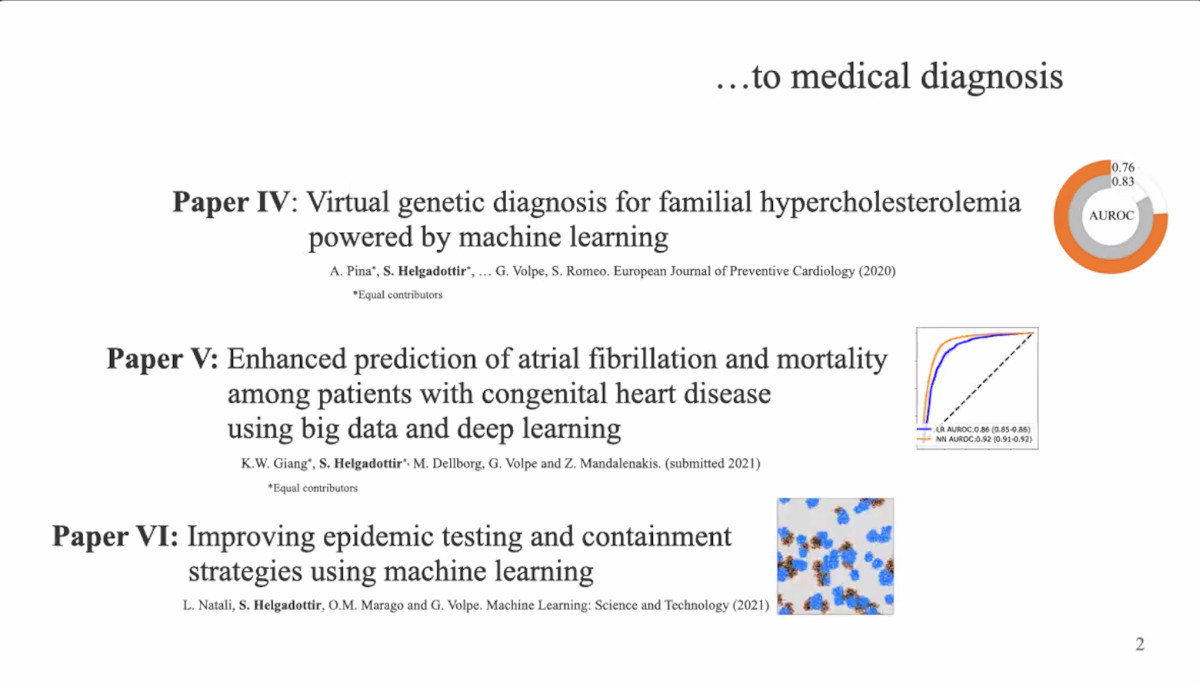
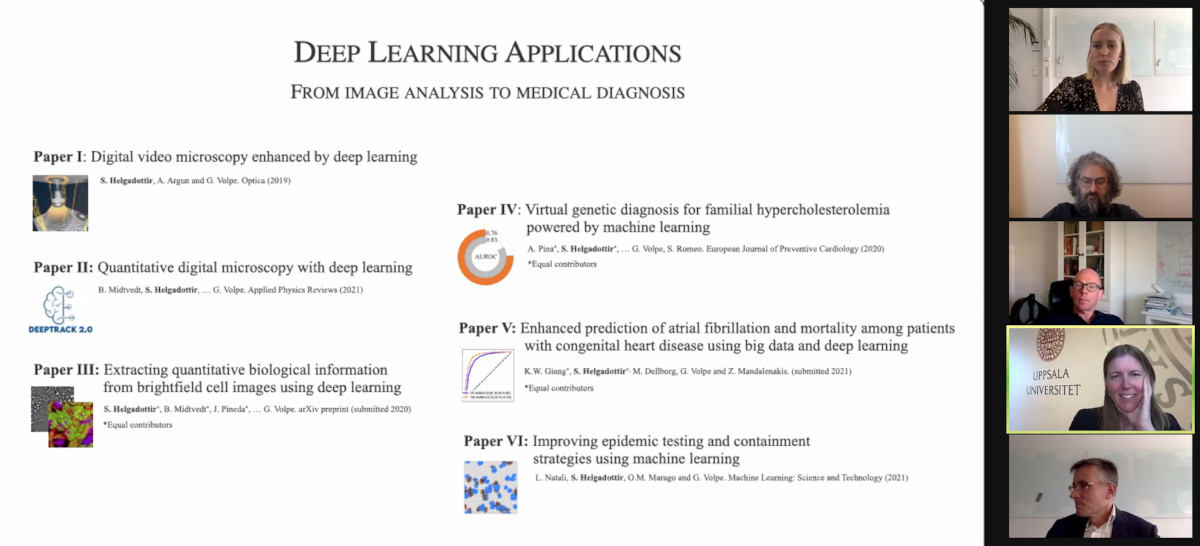
Title: Deep Learning Applications – From image analysis to medical diagnosis
Abstract:
Deep learning is a subcategory of machine learning and artificial intelligence. Instead of using explicit rules to perform a desired task as in standard algorithmic approaches, machine-learning algorithms autonomously learn from data to determine the rules for the task at hand. The idea of deep learning has been around since the 1950s but was for a long time limited by available computational power and amount of training data. Once overcome these problems, in recent years, deep learning has made great advances in solving various problems.
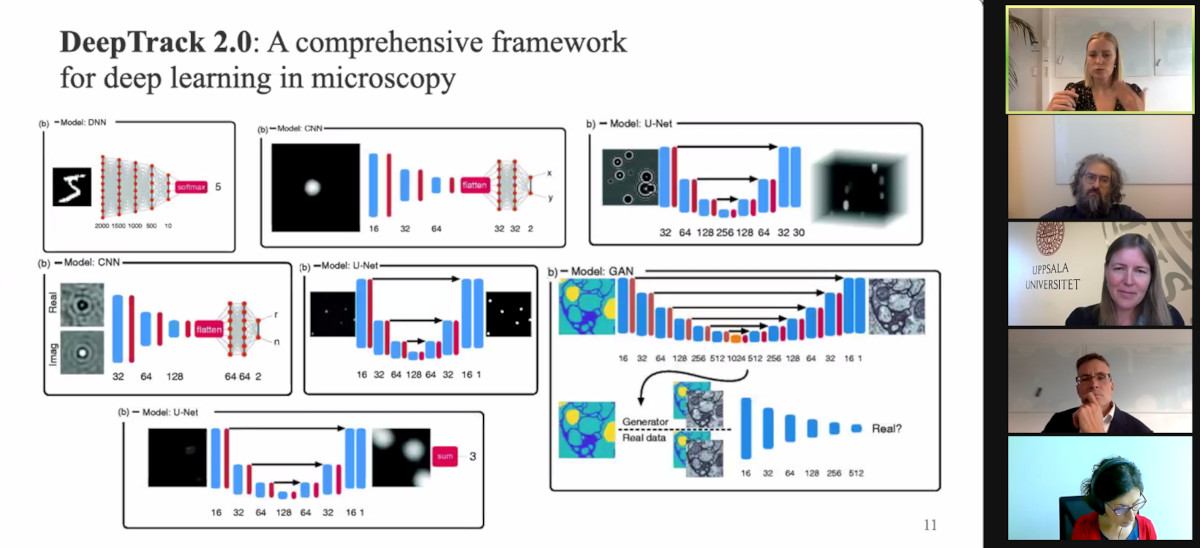
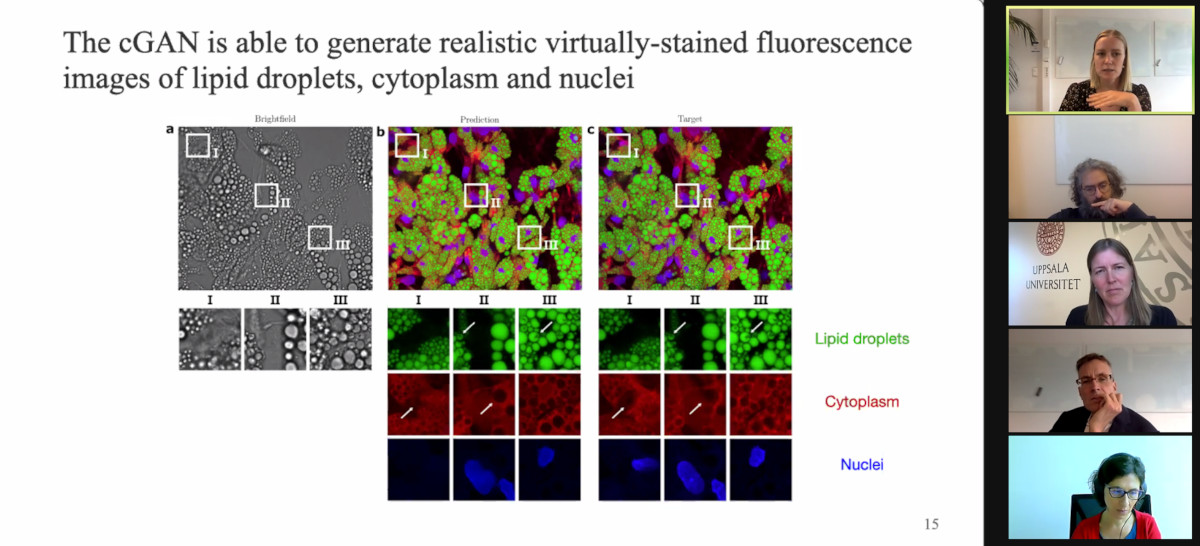
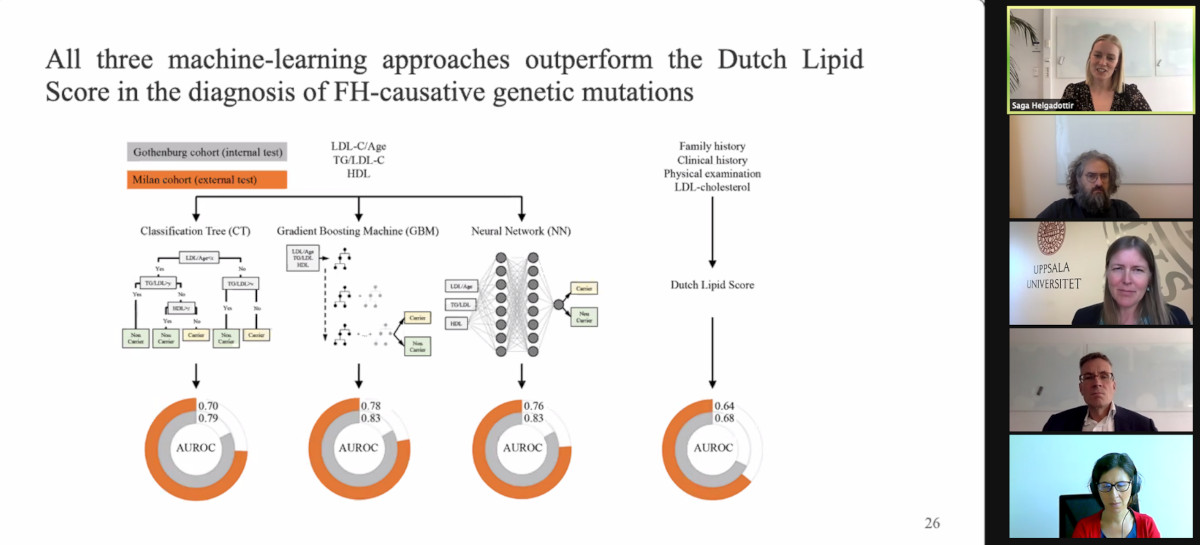
In this thesis, I show how deep learning can be applied in image analysis and medical diagnosis, while outperforming standard algorithmic methods and simpler machine-learning methods. I begin with showing that a convolutional neural network trained with simulated particle images is able to track experimental single particles, even in poor illumination conditions. I then show how this inspired the development of an all-in-one software to design, train and validate deep-learning solutions for digital microscopy, from particle tracking and characterization in 2D and 3D to the segmentation, characterization and counting of biological cells and image transformation. I show that this software package can be further used to develop a generative adversarial neural network to virtually stain brightfield images of cells, replacing the traditional chemical staining for a downstream analysis of biological features. I then move on from applications in microscopy and image analysis to show the potential of deep learning in medical diagnosis. I show that dense neural networks perform better than simpler machine-learning algorithm and the clinical standard in the diagnosis of a genetic disease and in the prediction of short- and long-term morbidity in patients with congenital-heart-disease. At last, I have shown that a neural network- powered strategy for testing and isolating individuals adapts to the parameters of a disease outbreak achieves an epidemic containment.
The interdisciplinary nature of the work in this thesis has allowed the application of new technologies developed in the field of physics to solve problems in the fields of biology and biomedicine, as well as overcoming barriers for the continued revolutionization of deep learning in microscopy.
Olle Fager defended his Master thesis in MPCAS at the Chalmers University of Technology on 15 June 2021. Congrats!
Title: Real-Time Multi-Object Tracking and Segmentation with Generated Data using 3D-modelling
Multi-Object Tracking and Segmentation (MOTS) is an important branch of computer vision that has applications in many different areas. In recent developments these methods have been able to reach favorable speed-accuracy trade-offs, making them interesting for real-time applications. In this work different deep learning based MOTS methods have been investigated with the purpose of extending the DeepTrack framework with real-time MOTS capabilities. Deep learning methods rely heavily on the data on which they are trained. The collection and annotation of the data can however be very time-consuming. Therefor, a pipeline is developed and investigated that automatically produces synthetic data by utilizing 3D-modelling. The most accurate tracker achieves a MOTSA score of 94 and the tracker with the best speed-accuracy trade-off achieves a MOTSA score of 88. It is also observed that satisfactory results can be achieved in most situations with a quite general data generation pipeline, indicating that the developed pipeline could be used in different scenarios.
Name of the master programme: MPCAS – Complex Adaptive Systems Supervisor: Giovanni Volpe Examiner: Giovanni Volpe, Department of Physics, University of Gothenburg Opponent: Arianit Zeqiri and Morad Mahmoudyan