The defense took place in PJ, Institutionen för fysik, Origovägen 6b, Göteborg, at 10:00.
Title: Microfabrication technique applications: from passive particle manipulation to active microswimmers, micromachines, and fluidic control
Abstract: Overcoming Brownian motion at the micro- and nanoscale to achieve precise control of objects is crucial for fields such as materials science and biology. Significant progress has been made in trapping and manipulating micro- and nanoscale objects, either by generating gradients through external physical fields or by engineering systems that can harvest energy from their environment for autonomous motion. These techniques rely on the precise application of forces, such as optical and electromagnetic forces, and have found extensive applications across various scientific disciplines. Recent advances in micro- and nanofabrication technologies have greatly enhanced the generation and regulation of these forces, offering new possibilities for manipulating micro- and nanoscale objects.
This thesis applies traditional micro- and nanofabrication techniques, typically used in semiconductor manufacturing, to construct micro- and nanostructures for manipulating forces, primarily critical Casimir forces and optical forces, to achieve precise control over microscale object movement.
I first show the fabrication of periodic micropatterns on a substrate, followed by chemical functionalization to impart hydrophilic and hydrophobic properties. Near the critical temperature of a binary liquid, attractive and repulsive critical Casimir forces are generated between the micropatterns and microparticles. These forces allow the stable trapping of the microparticles on the substrate and the manipulation of their configuration and movement.
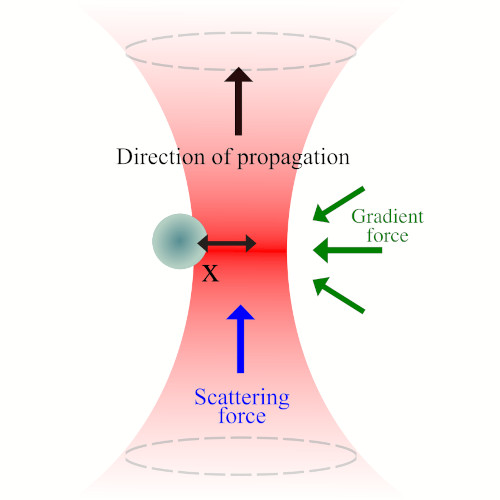
Then, my research transitions from passive control to active motion by fabricating metasurfaces capable of modulating optical fields and embedding them within micro-particles (microswimmers). This enables light-momentum exchange under planar laser illumination, resulting in autonomous movement of the microswimmers. By varying the metasurface design as well as the intensity and polarization of the light, complex behaviors can emerge within these microswimmers. Subsequently, My research focused on using these microfabrication techniques to build micromotors integrated on a chip surface. These micromotors couple with other objects through gear structures, creating miniature machines that can execute functional tasks. Finally, by altering the configuration of these machines and the distances between them, I acheived precise, multifunctional control over fluid dynamics, facilitating the transport of micro- and nanoscale objects.
Insights gained from this research suggest innovative manufacturing approaches for scalable manipulation of particles, more intelligent microrobots, and powerful miniaturized on-chip machines, with applications across various fields.
Thesis: https://hdl.handle.net/2077/84048
Supervisor: Giovanni Volpe
Examiner: Dag Hanstorp
Opponent: Peer Fischer
Committee: Heiner Linke, Anna Maciolek, Hao Zeng
Alternate board member: Francesco Ferranti