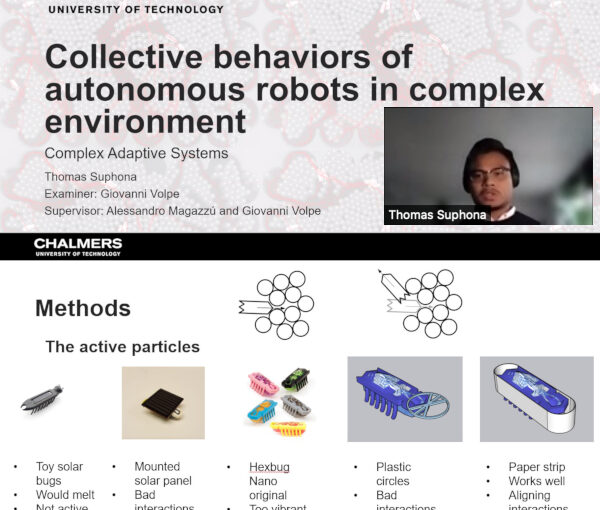
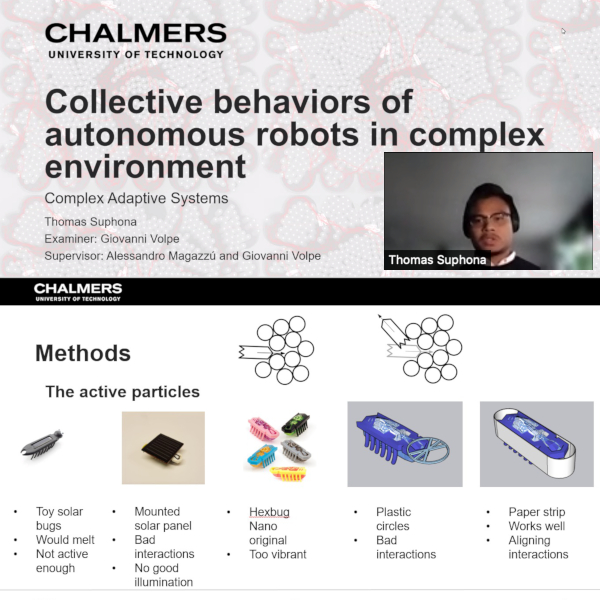
Thomas Suphona defended his Master thesis in Physics at the Chalmers University of Technology on 27 september 2021. Congrats!
Collective behaviours or collective motion is a common phenomena in nature where multiple organisms in a system undergo ordered movements. This can be observed in different scales, from the microscale with bacteria swarming to the macro scale with for example flocks of birds, schools of fish and even human crowds and car traffic.
All these systems are made up by self-propelling agents who are able to take up energy from their environment and converting it to directed motion.
Because of this
property of self-propulsion, their dynamics cannot be explained using conventional methods. Although significant efforts have been made in trying to explain collective behaviours from different perspective, using simulation tools and study systems in different scales as mentioned before, the subject is not as widely studied from the macroscale, especially with artificially made systems. In this thesis, a macroscale system was design with the purpose of providing conditions for collective behaviours to emerge and study how the behaviours changes depending on the surrounding conditions. Battery powered robots were used as self-propelling agents and they were placed in a confined space filled with obstacles. It was shown that when the number of robot and obstacles inside the system is large, the robots movements were significantly restricted. The weight of the obstacles do also affect the average motions of the robots where heavier obstacles hinders the robots by creating blockage leading to the robots having lower average velocity. At certain configuration of the parameters, the robots showed collective behaviours where they for example form channels between the obstacles, making ”roads” for other robots to reuse, or helping each other to move by pushing away chunks of obstacles or pushing onto each other. Even though these robots are simple agents, they have manage to manifest cooperative actions towards other agents.
Supervisor: Giovanni Volpe and Alessandro Magazzú
Examiner: Giovanni Volpe
Opponent: David Fitzek
Date: 27 September, 2021,
Time: 16:00
Place: Online via Zoom
Link: Master thesis presentation Thomas Suphona